电机控制技术学习笔记
2024/4/5大约 5 分钟
电机控制技术学习笔记
目录
无刷电机简介
无刷直流电机
- 无刷直流电机(Brushless DC Motors)(BLDC)
- 也称无换向器电机
- 无电刷无换向器
驱动方式
- 方波驱动BLDC
- 外转子式
- 内转子式
- 外转子式
- 正弦波驱动
- 永磁同步PMSM
- 永磁同步PMSM

BLDC与PMSM
| 不同点 | BLDC | PMSM |
|---|---|---|
| 反电动势 | 具有梯形反电动势 | 具有正弦波反电动势 |
| 运行电流 | 梯形波电流 | 正弦波电流 |
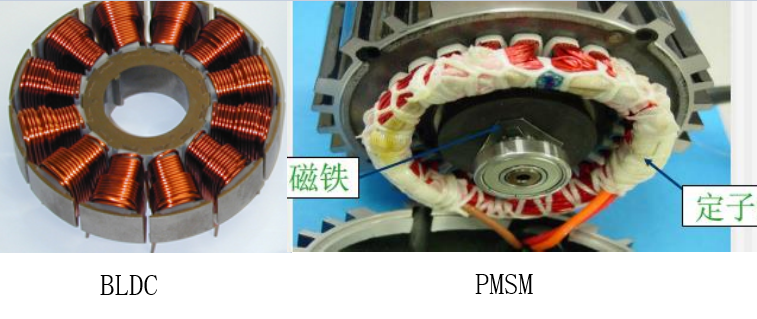
| 绕组方式 | 定子绕组为集中绕组, 永磁转子形成方波磁场 | 定子绕组为分布绕组, 永磁转子形成正弦磁场 |
| 控制方式 | 控制算法相对简单(6步换向) | 控制算法复杂(FOC) |
| 运行方式 | 绕组两两导通 | 绕组三相全部导通 |
BLDC集中绕组和PMSM分布绕组
BLDC控制方式与PMSM控制方式
主要参数
- 极对数: 转子磁铁NS级的对数,此参数影响电机旋转速度
- 无刷电机磁场的转速和磁极对数是成反比关系的。
- 在功率一样,极数不一样的情况下,
- 磁极对数越多,转速就相应降低,这样子体积定子体积会相对增大,输出扭矩大;反之,
- 磁极对数越少,转速越高,体积越小,但输出的扭矩也小。
- KV值: 值越大电机转速越大。电机转速 = KV值*工作电压
- 额定转速: 额定的电流下的空载转速,通常单位用RPM表示
- 转矩: 电机中转子产生的可以带动机械负载的驱动力矩。通常单位为:N-M
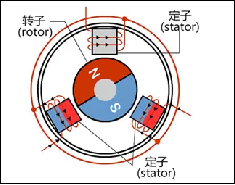
驱动原理
BLDC内部结构图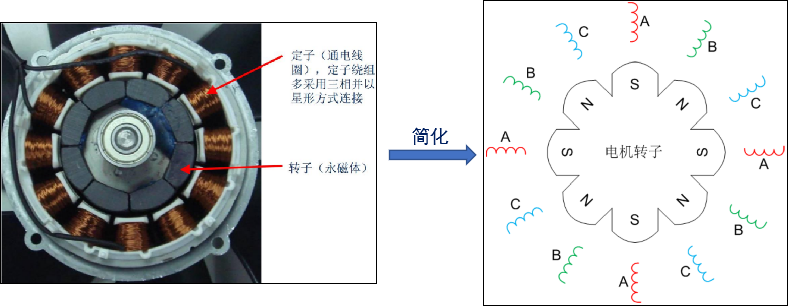
驱动原理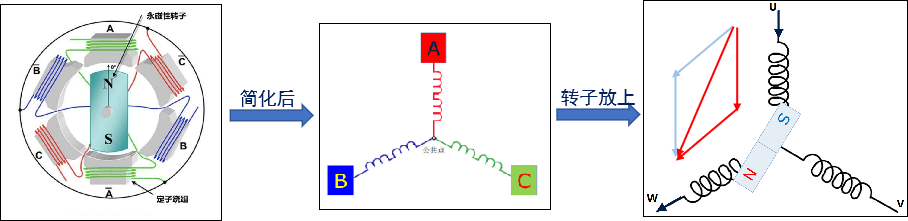
六步换相
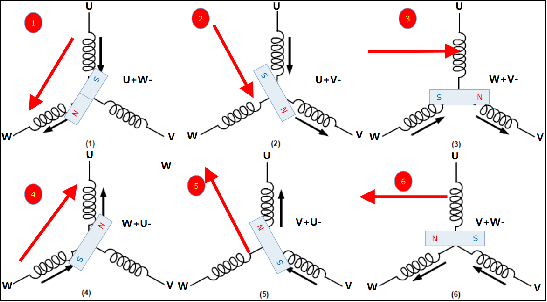
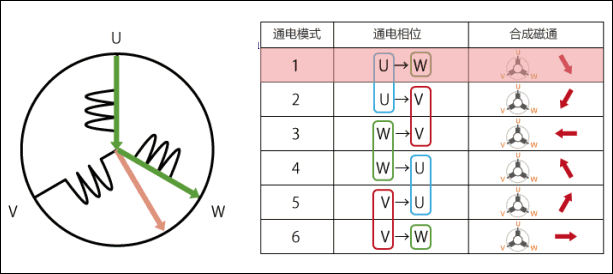
三相极性的切换
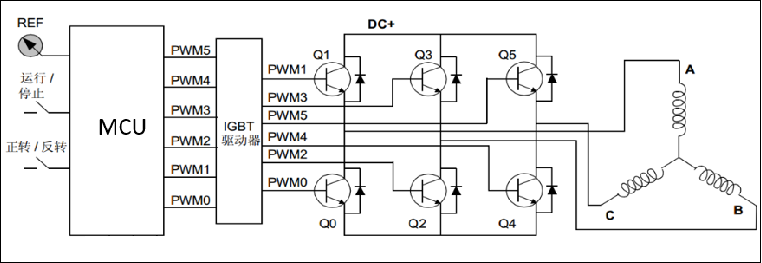
使用三相逆变电路来实现极性的更换
- 上面的方式是直接把电源加载到线圈上,会使电机很快飙到很高的速度。
- 所以一般都是将高低电平用PWM来代替,这样可以方便的控制线圈电流,从而控制转子扭矩及转速。
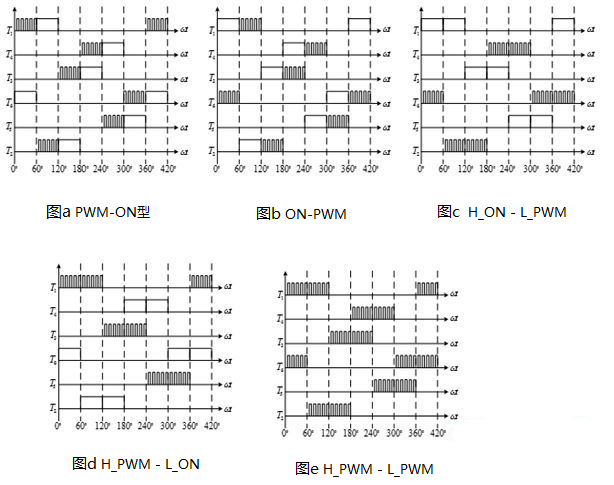
常见的六种PWM控制直流无刷电机方法
- 主要分为全桥调制和半桥调制
- 半桥调制
- 对称型半桥调制
- 图A:在120度的周期内,上管先用pwm信号控制,后用开关信号控制,下管先用开关信号控制,后用pwm信号控制.
- 图B:在120度的周期内,上管先用开关信号控制,后用pwm信号控制,下管先用pwm信号控制,后用开关信号控制.
- 非对称性半桥调制
- 图C:上管用开关信号,下管用pwm信号
- 图D:上管用pwm信号,下管用开关信号
- 对称型半桥调制
- 全桥调制
- 图E为全桥调制,即上下管都使用PWM信号控制
- 半桥调制
电机的位置检测
位置检测
- 位置传感器(霍尔)
- 无传感器(反向电动势)
有感位置检测
霍尔传感器检测转子位置
- 电角度 = 机械角度 * 极对数
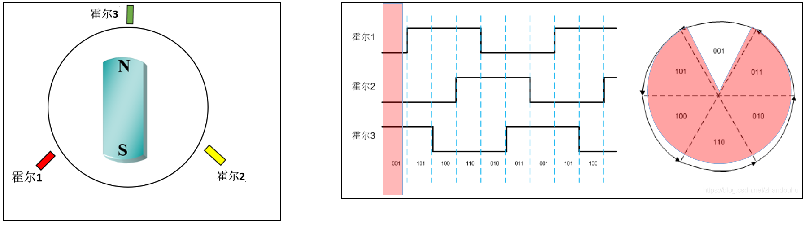
霍尔传感器安装位置对应的波形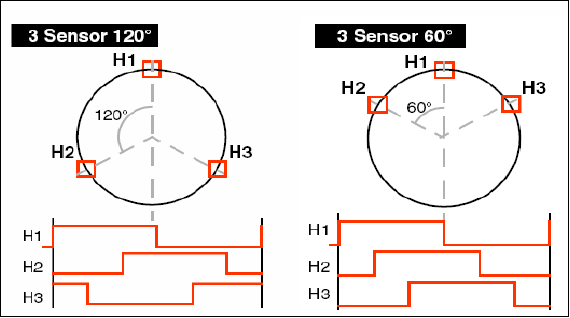
机械角度\电角度\极对数
- 机械角:转子物理上旋转的角度,描述的是转子的位置,可以通过传感器测量。
- 电角:描述的是电流或者电压的在一个电周期内的相位角度。
- 公式:电角 = 极对数 ✖ 机械角
- 如果极对数为1,那么机械角度和电角度保持一致,即:电机转动120度,电压相位变化120度.
- 如果极对数为2,那么机械角度只有电角度的一半,即:电机旋转180度,电压相位变化360度.
无感位置检测
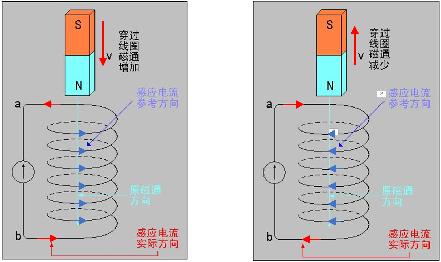
无感控制原理
- 楞次定律(感应电流的磁场总要阻碍引起感应电流的磁通量的变化)
- 动生电动势:一种由于导体在磁场中运动而在导体内部产生的电动势。
- 感生电动势:一种由于磁场变化而静止导体中产生的一种电动势。
过零点
- 反电点势从正变化为负或者从负变化为正的点
- 反电动势过零点都发生在不通电的那一相
检测过零点
- 电机旋转一个电周期中电流和反电动势的波形,其中实线代表电流,虚线代表反电动势
- 第一个60°内,A相电流为正,B相电流为负,C相电流为零,这说明电机AB相通电,电流从A相流入B相,C相为开路,
反电动势的过零点正好出现在C相,因此只要在每个60°内检测不通电那一相的电压,即可检测反电动势过零点。 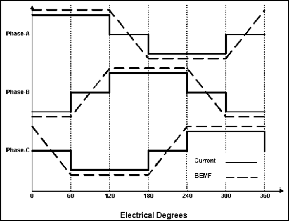
- 注意:
- 1、过零信号的组合确定转子位置
- 2、过零点发生在换相提前30°的时刻
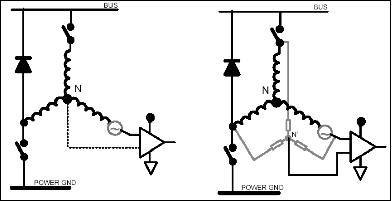
虚拟中性点
- 电机一般只引出三根线,要检测反向电动势,需要构建一个和中性点电位相等的虚拟中性点
相关方案
- 主控MCU为EFM8BB21
- 引脚定义:基于开源电调固件BLHeli_S
- 半桥驱动芯片:QFN20封装的FD6288,
- NMOS管:STL160N3(160A 30V)
- 固件烧录:淘宝购买C2下载器
- 供电:
- 3S-4S电池
- 78L08转8V
- SPX3819转3.3V,