51单片机重学笔记
2023/6/23大约 25 分钟
51单片机重学笔记

目录
基本概念
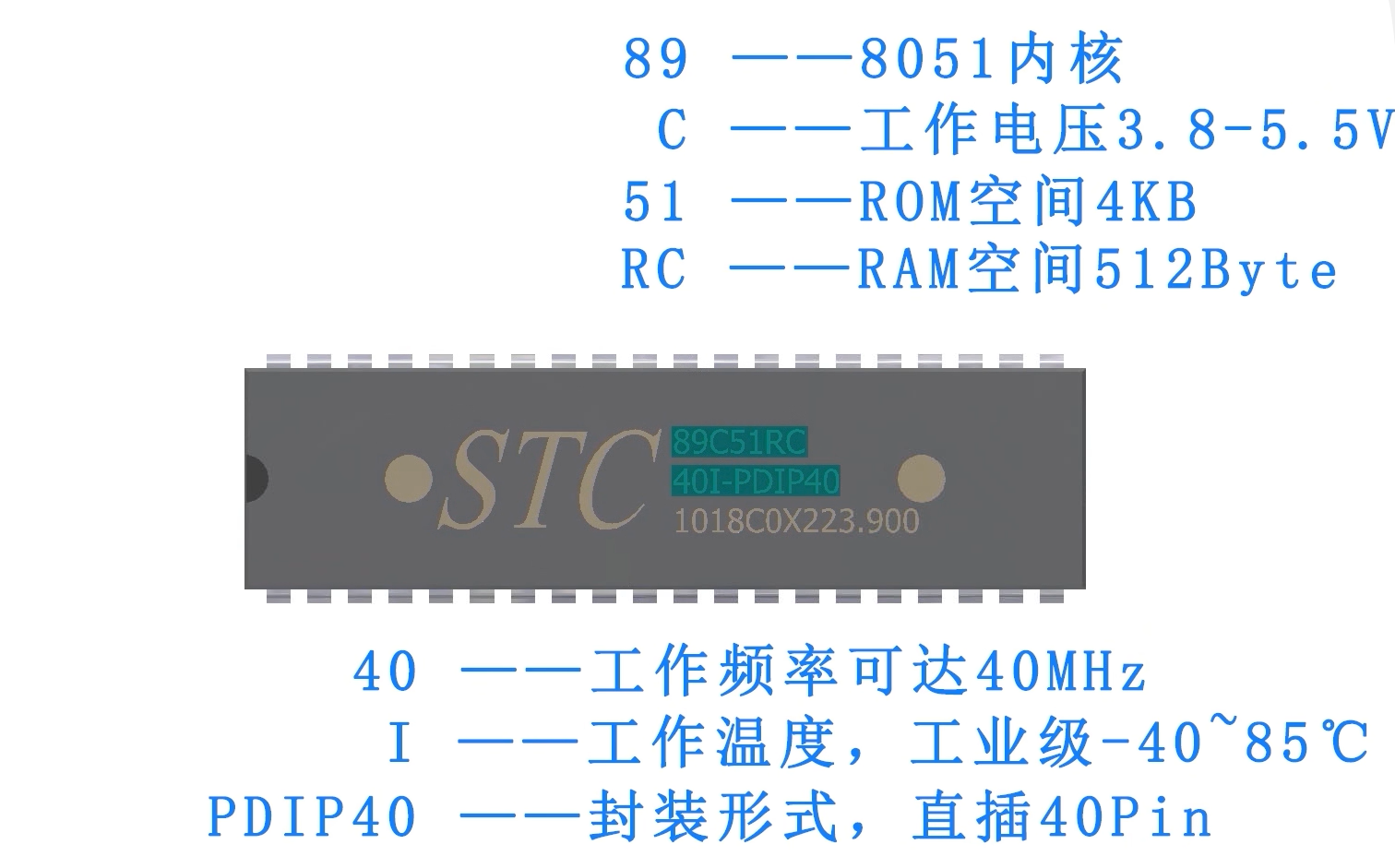
丝印含义
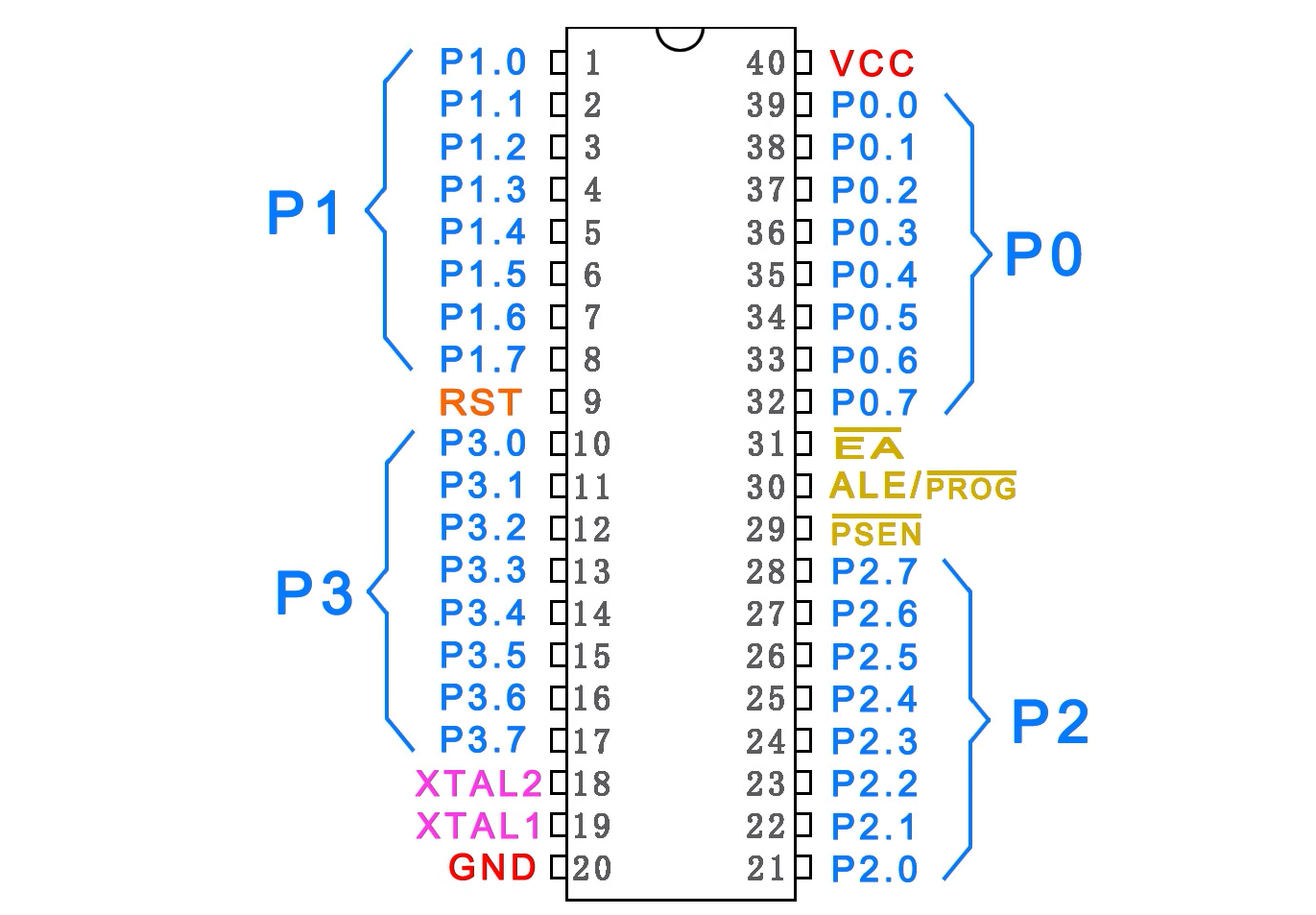
引脚功能
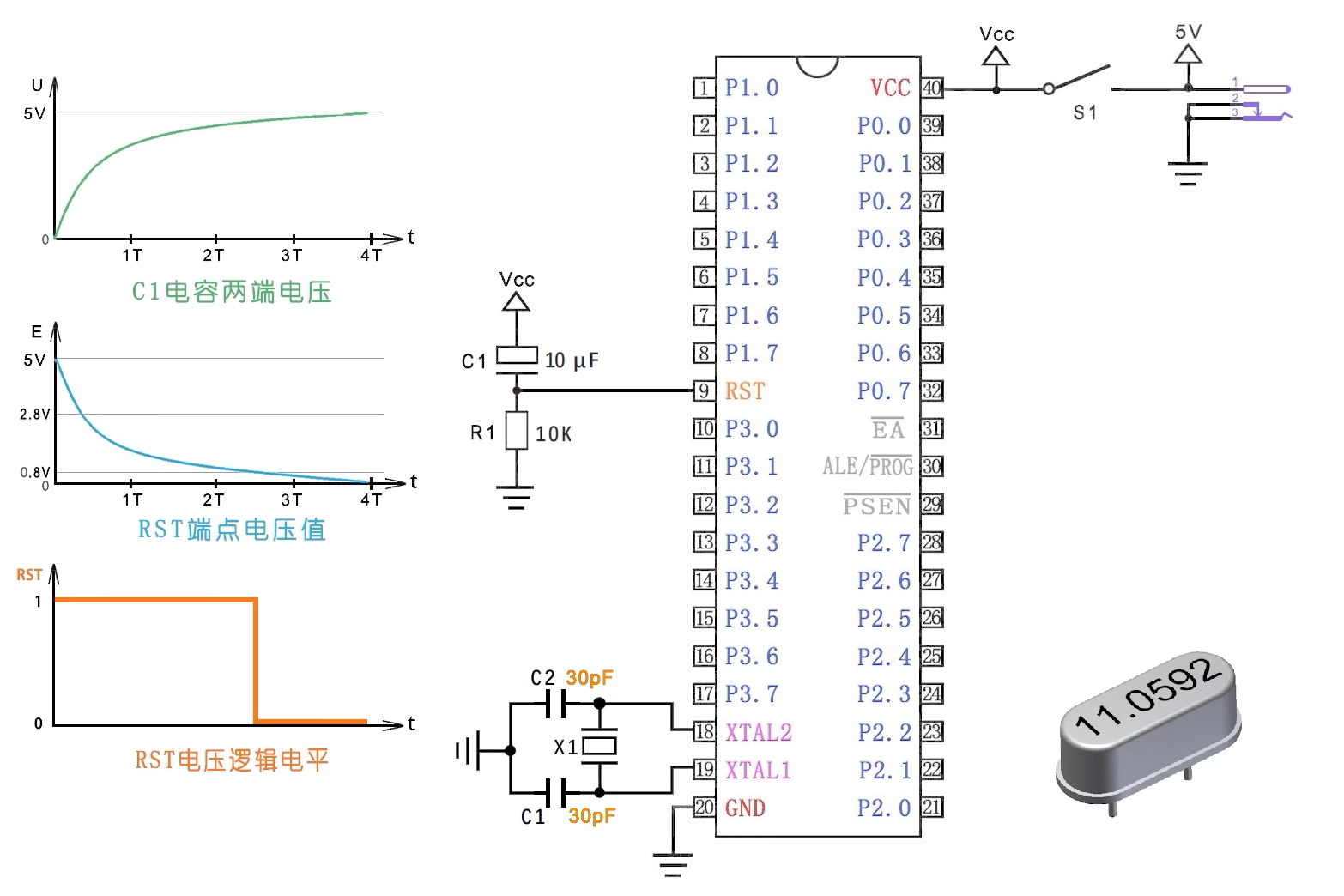
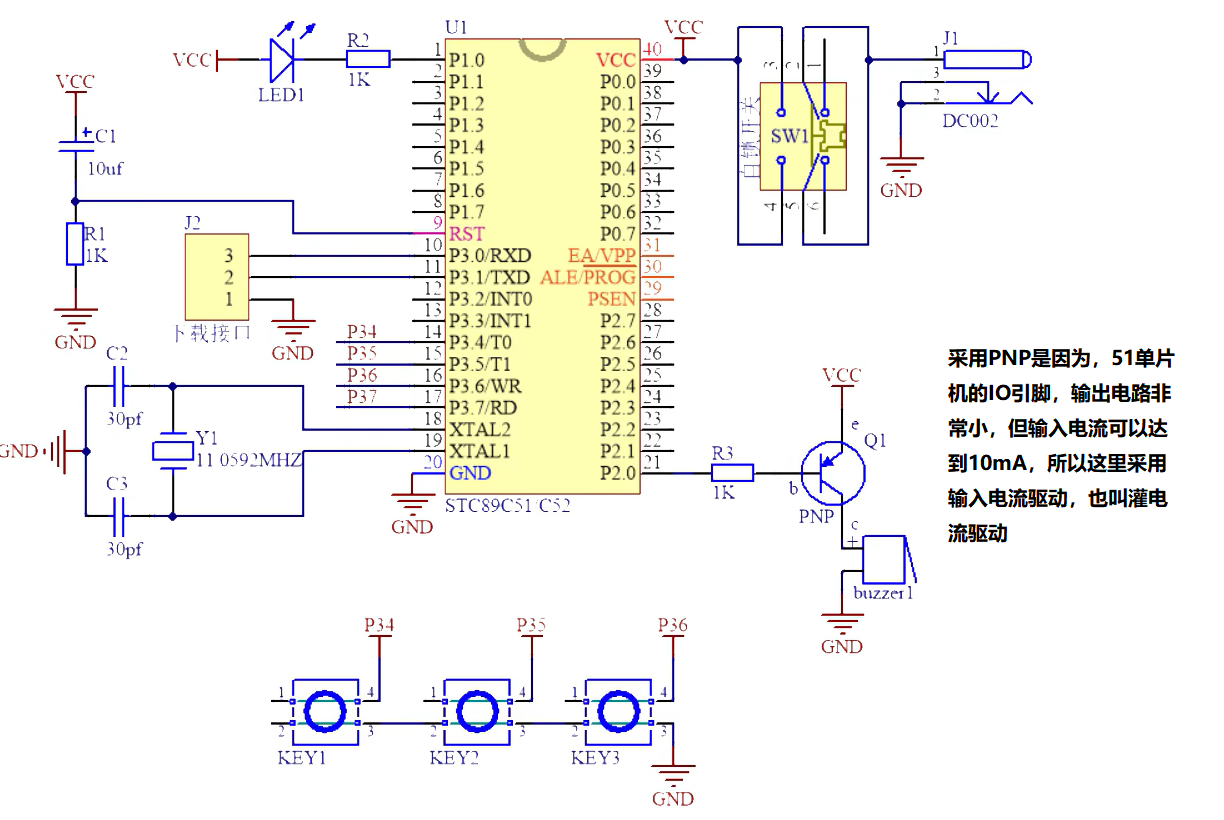
最小系统和复位电路
RST:复位引脚,高电平复位
- 电压高于2.8V视为逻辑1
- 电压低于0.8V视为逻辑0
- 上电时,电容C1上电压为0V,R1上电压为5V,RST高电平,电路复位
- 电容充电完毕后C1上电压为5V,R1上电压为0V
常用外围器件
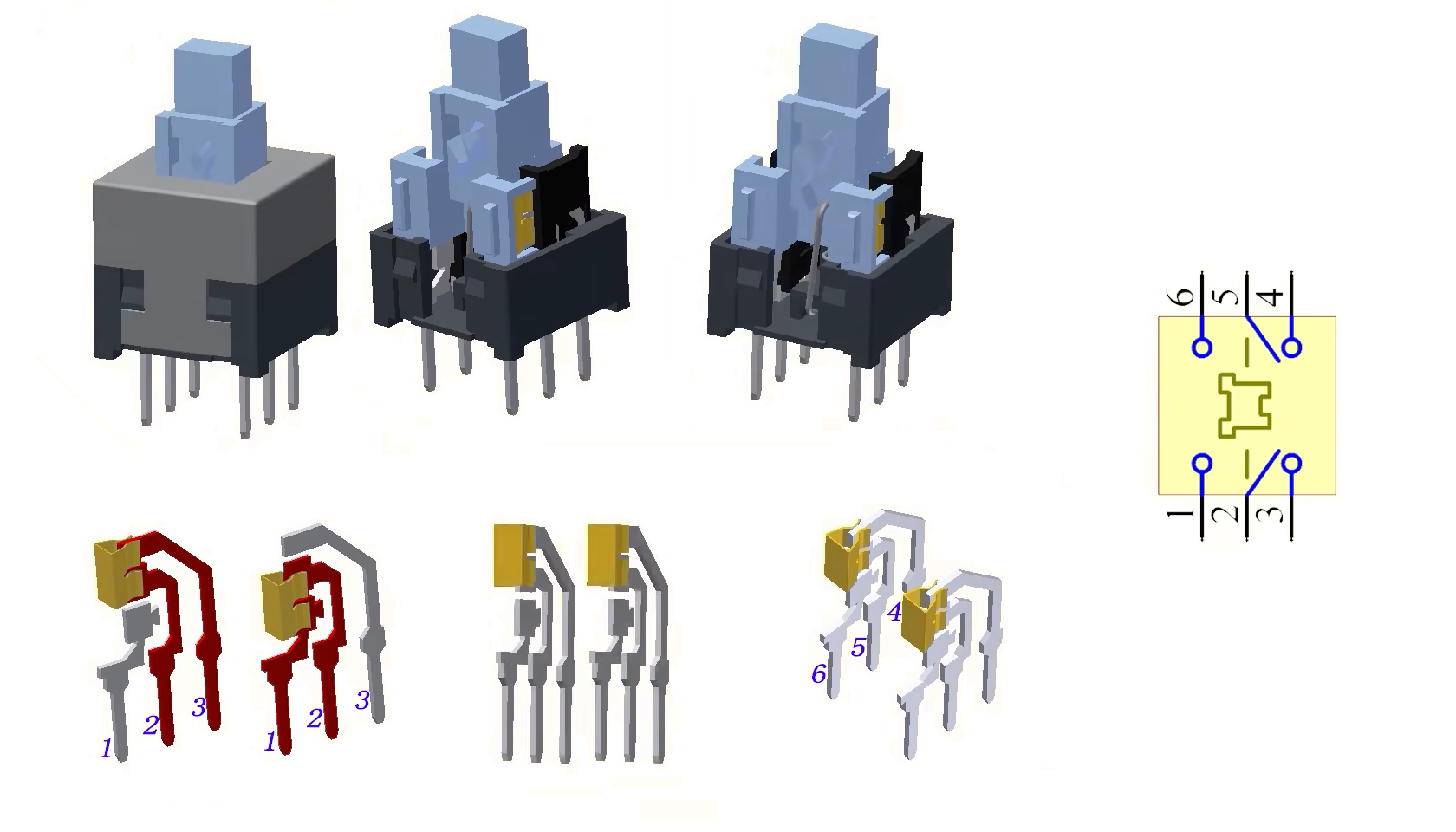
六角自锁开关
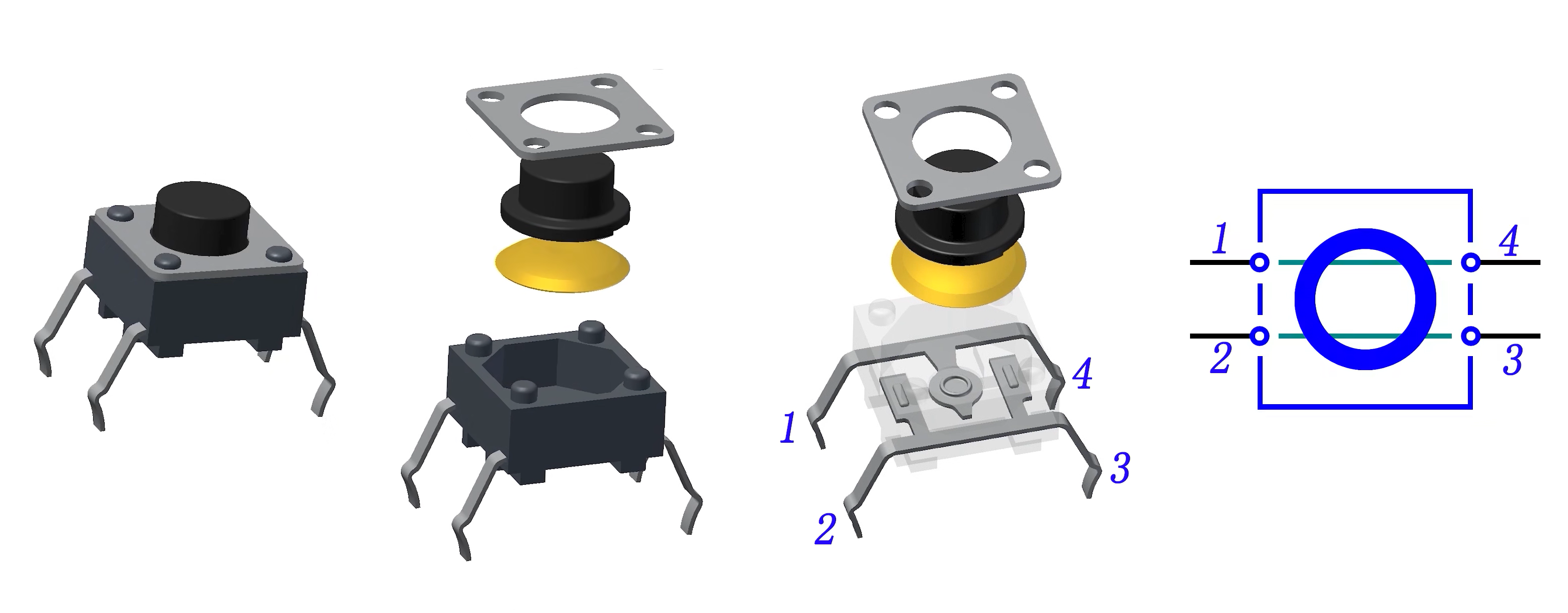
轻触开关
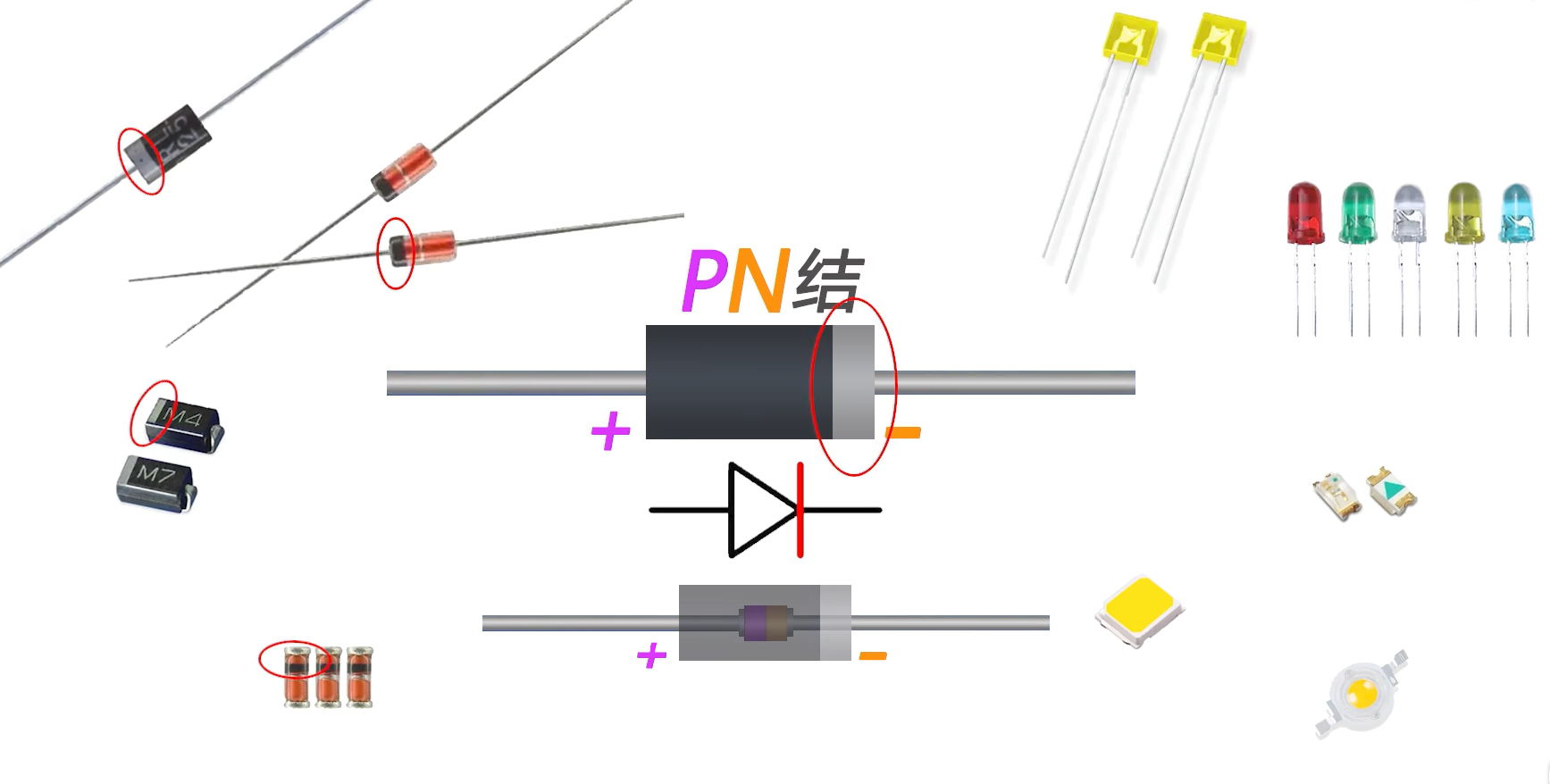
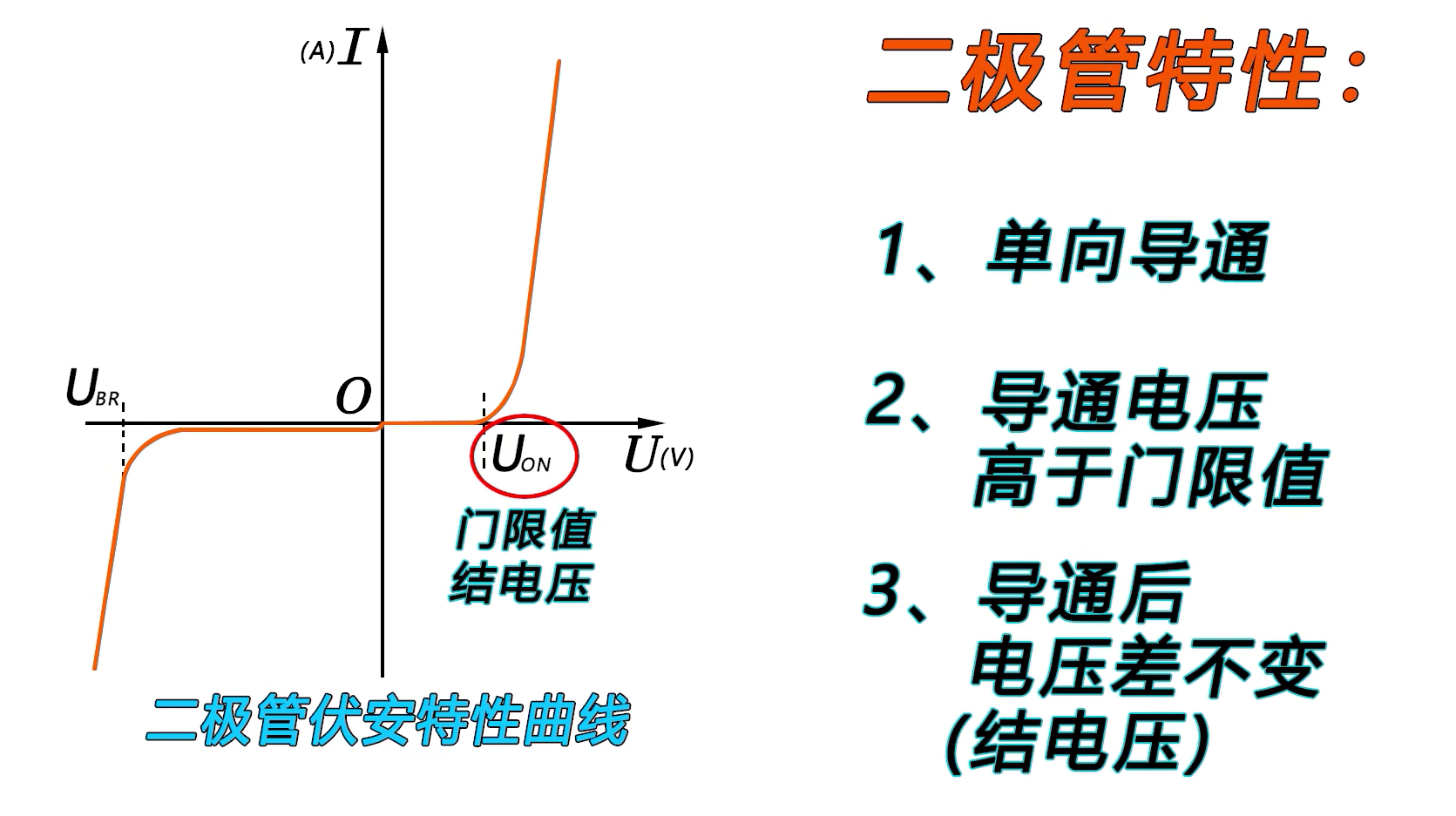
二极管
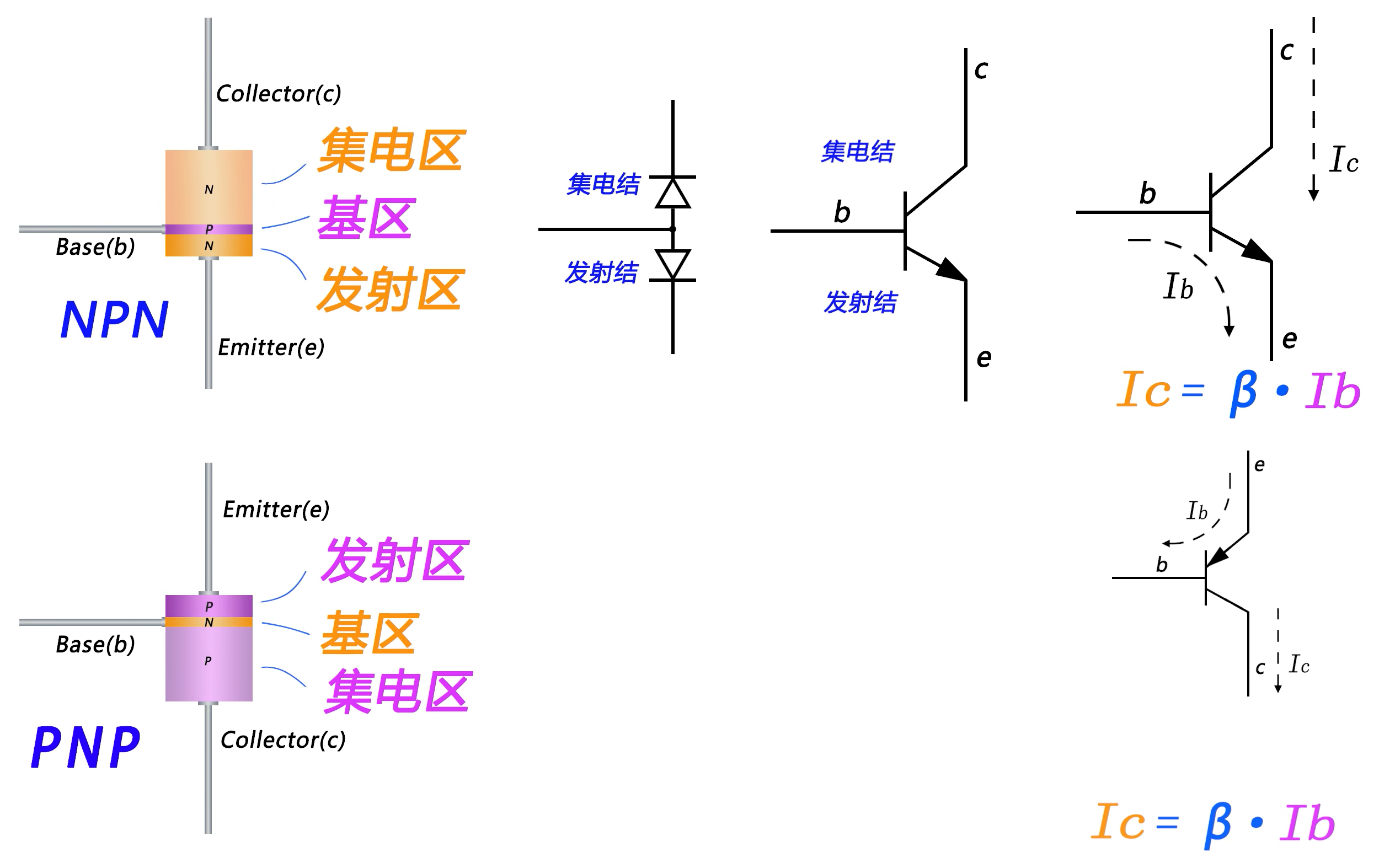
三极管
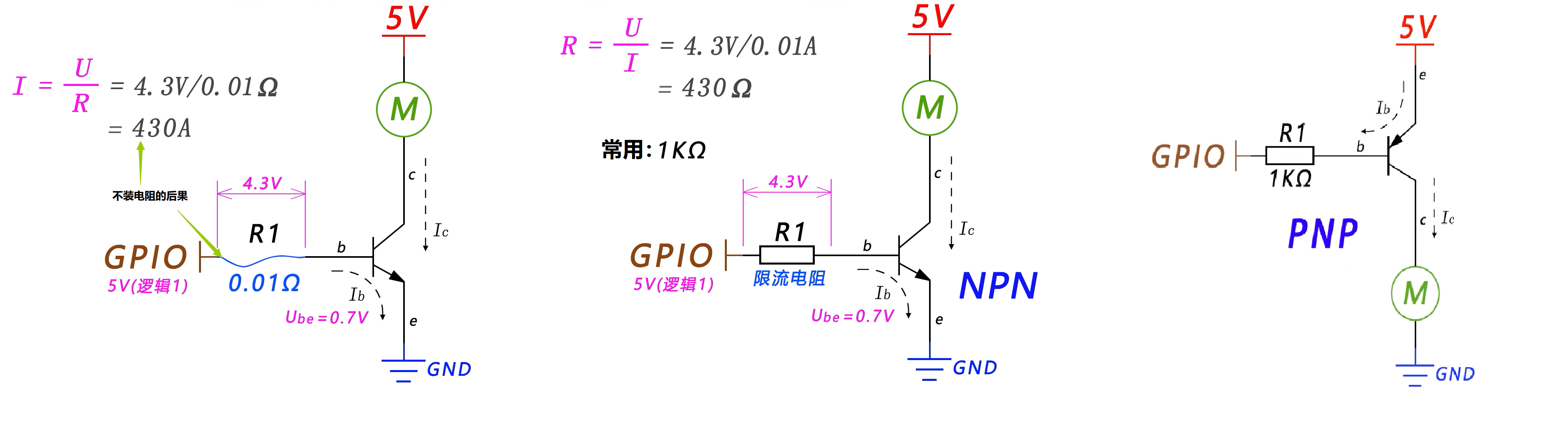
信号放大电路
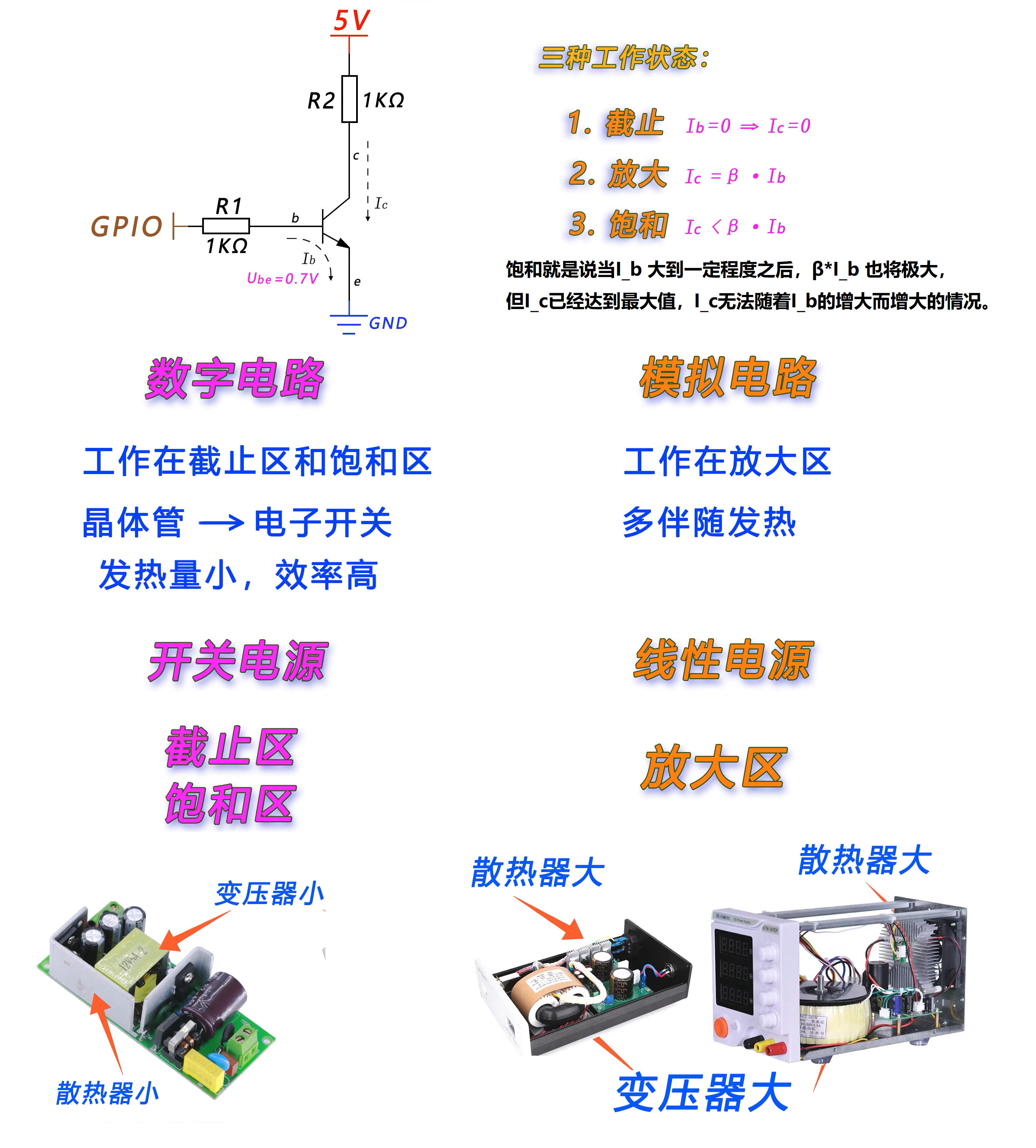
三极管三种工作状态
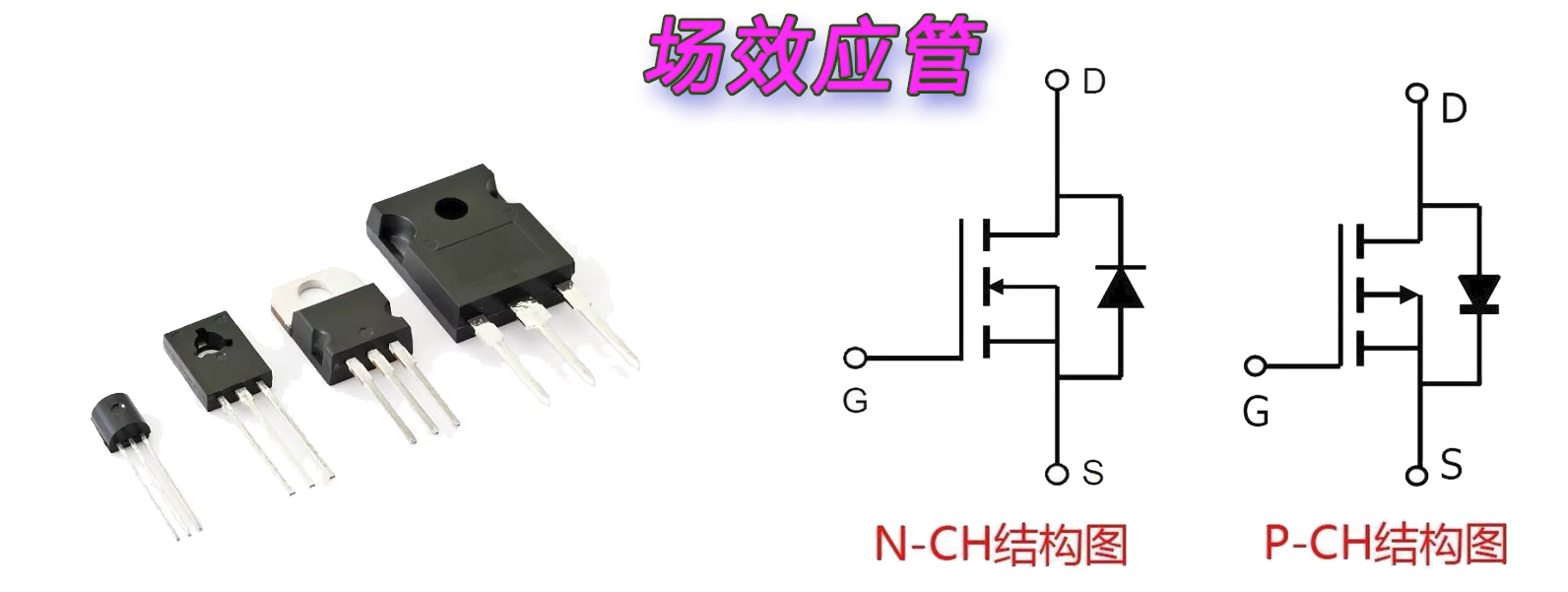
场效应管
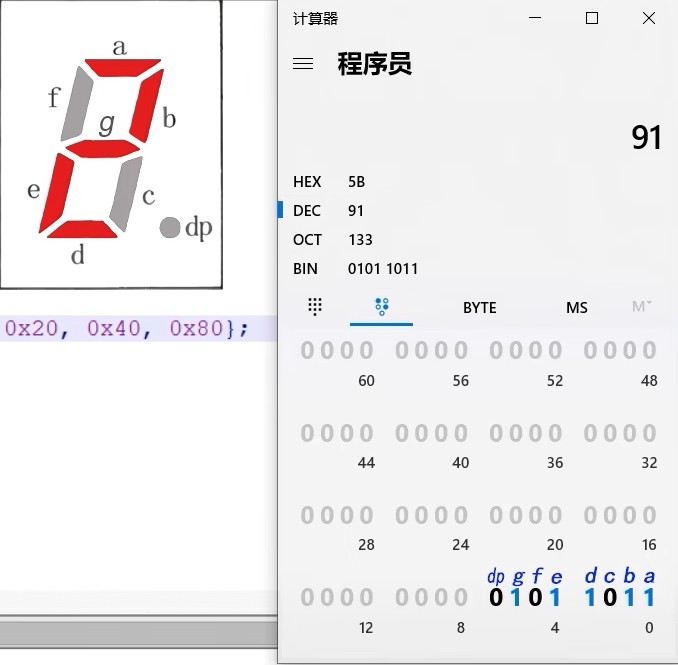
数码管
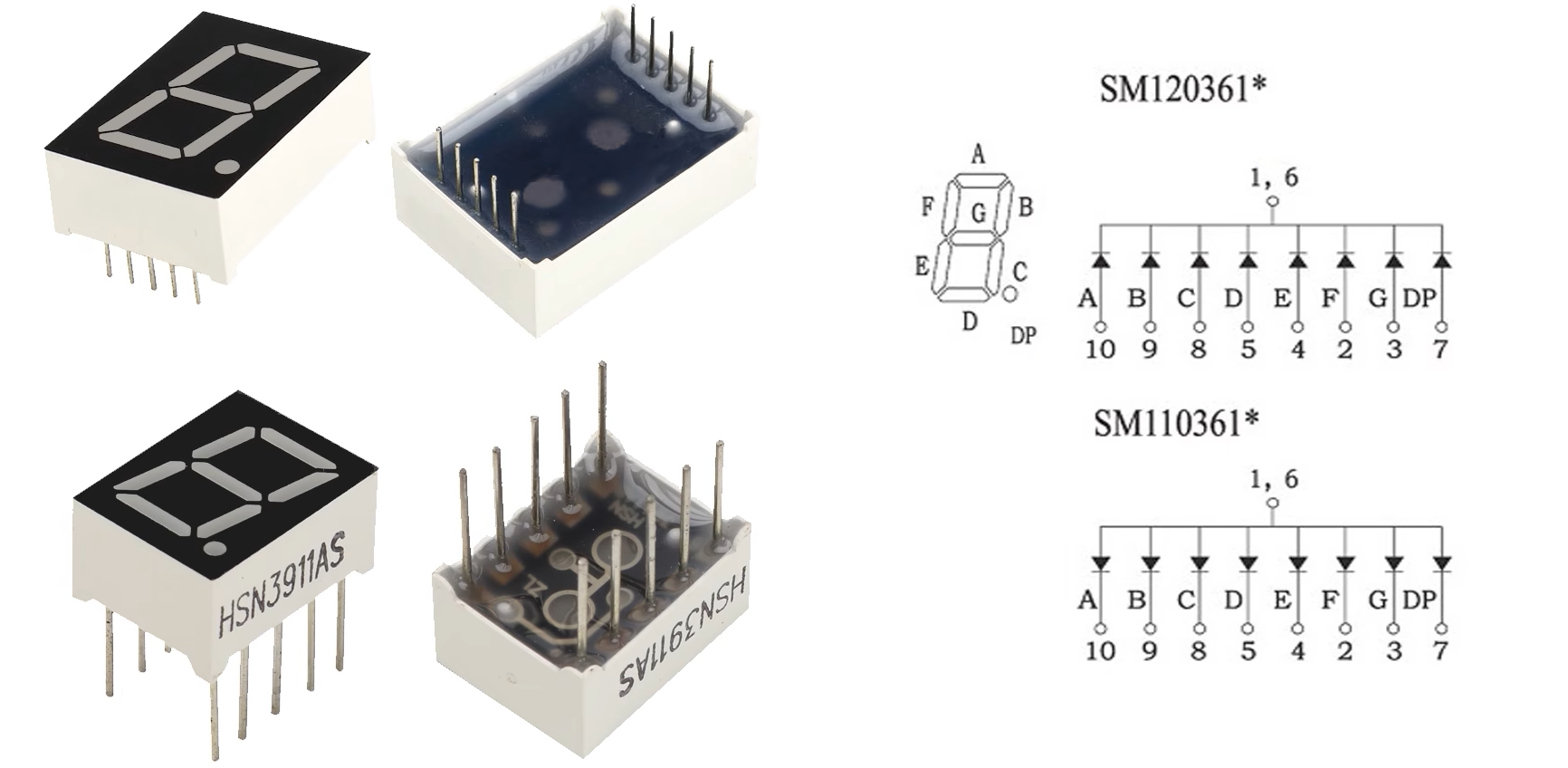
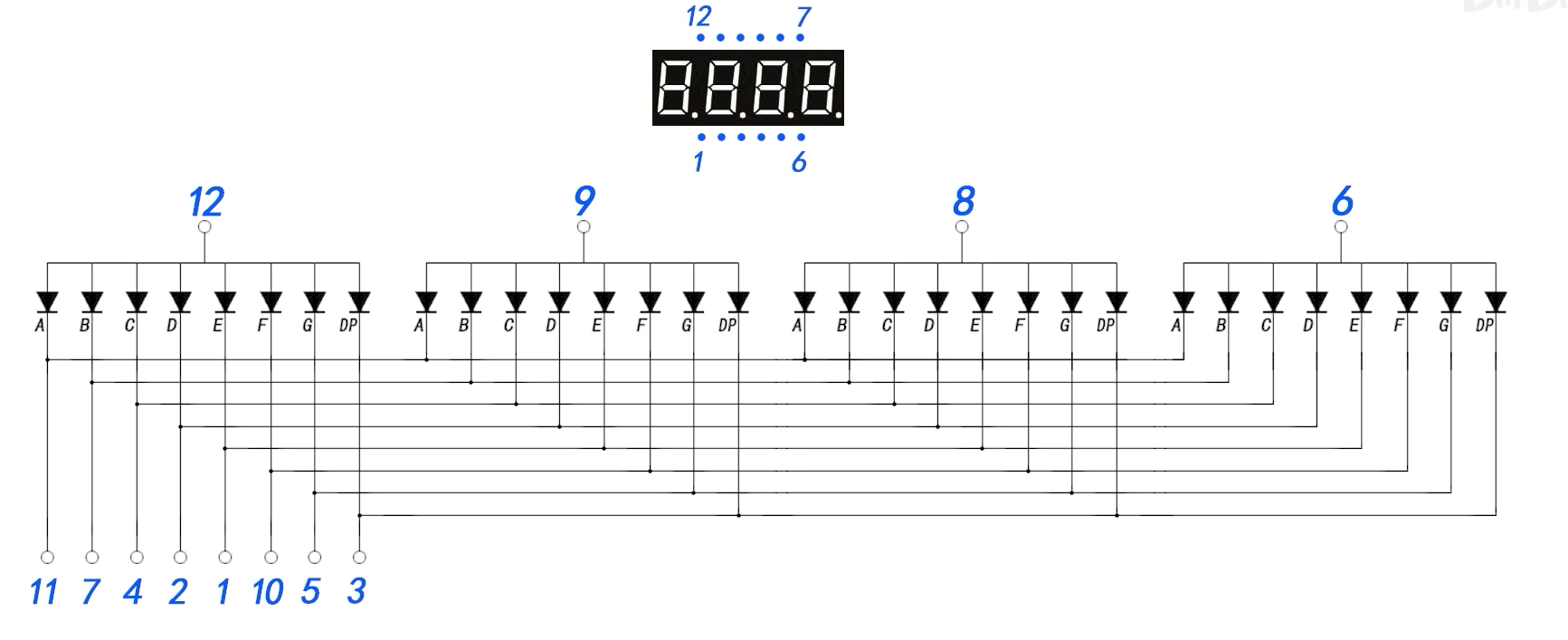
多位数码管
内部原理图
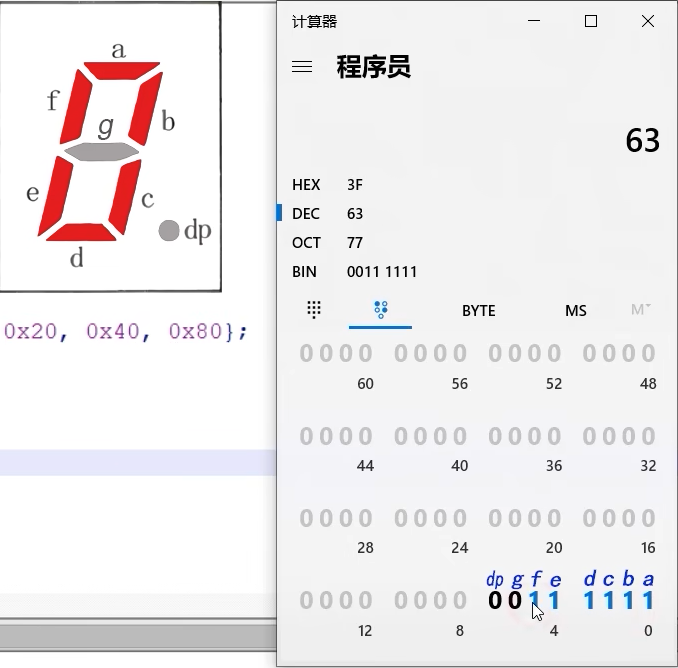
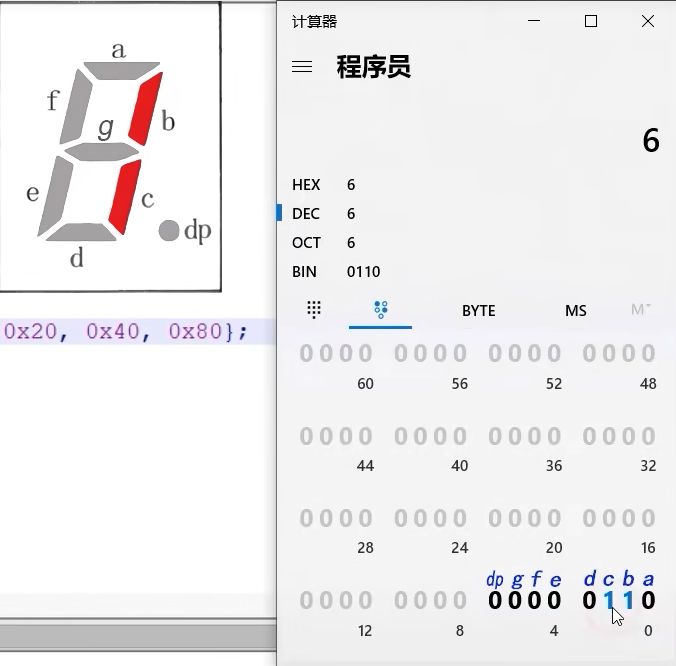
驱动原理图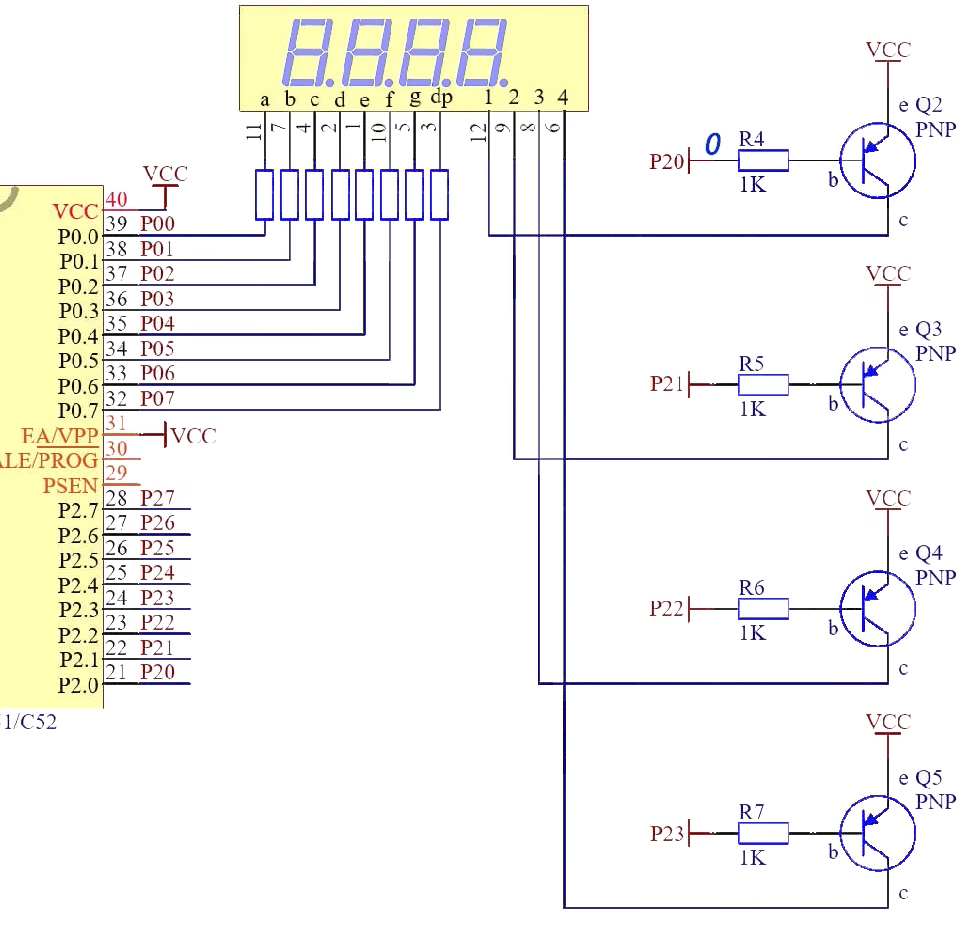
灌电流驱动
时钟周期、机器周期、指令周期
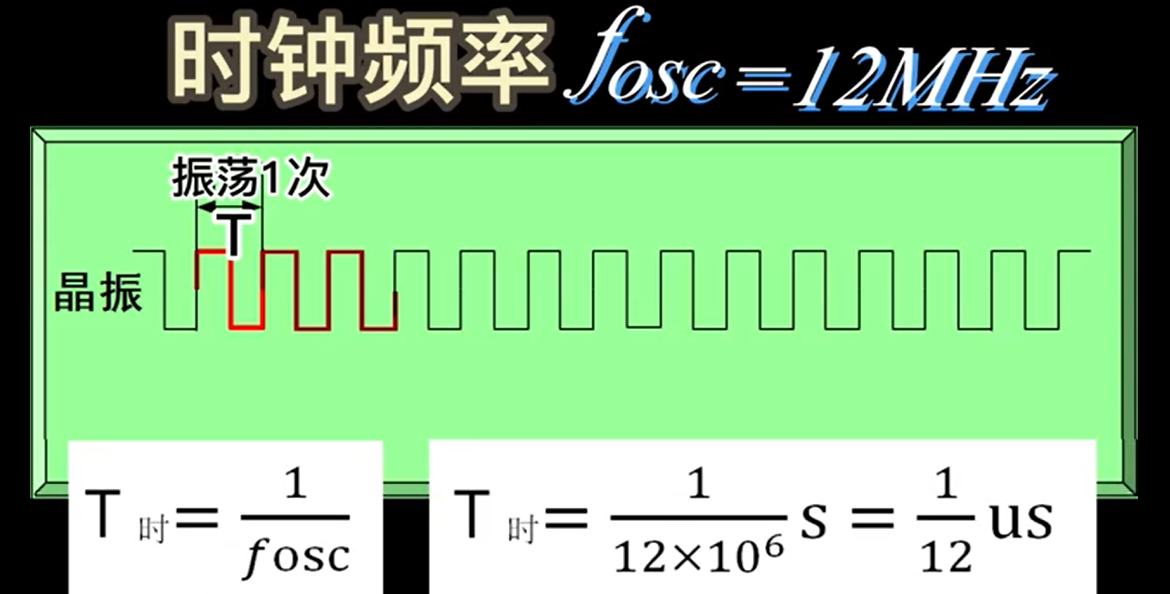
时钟周期/振荡周期:
- 是时钟频率的倒数
- 是单片机时序的最小单位,
- 51单片机中把1时钟周期定义为1节拍(用P表示),2个节拍定义为状态周期(用S表示)
- 时钟频率
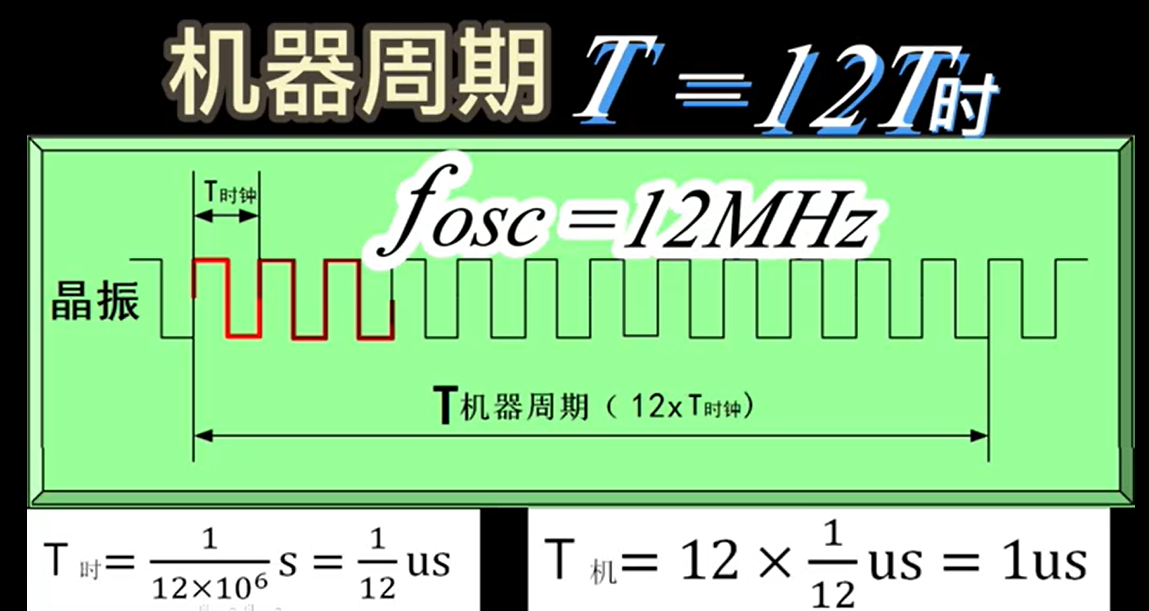
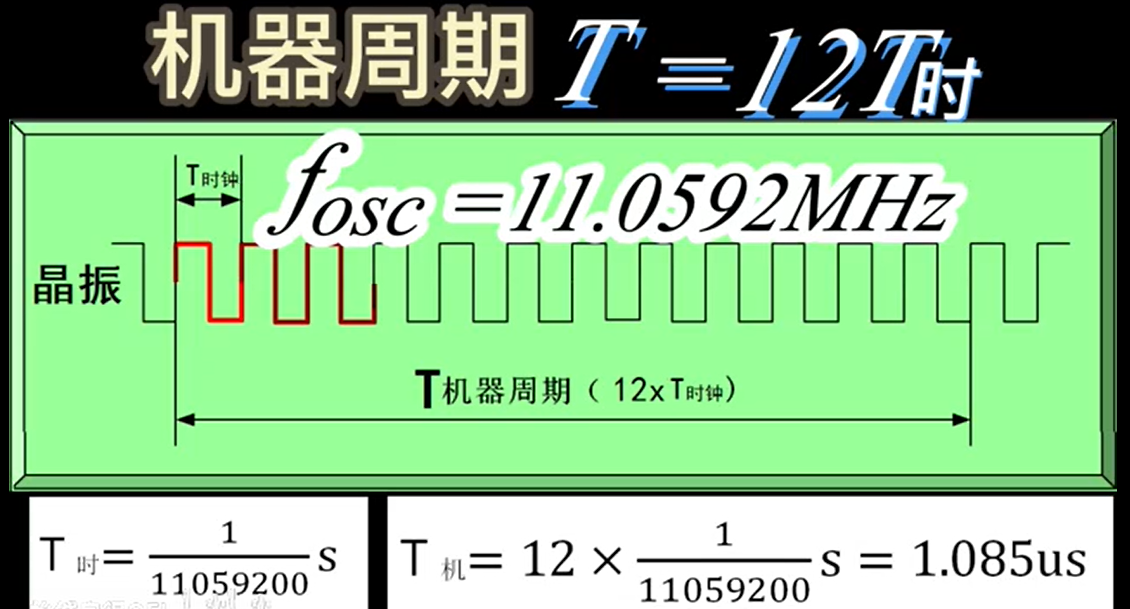
机器周期
- 定义为完成一项基本操作所需要的时间
- 在51单片机中1个机器周期由6个状态周期组成,也就是12个时钟周期
- 定义机器周期是因为时钟周期时间太短,根本做不了什么。
指令周期
- 定义为执行一条指令所需的时间。
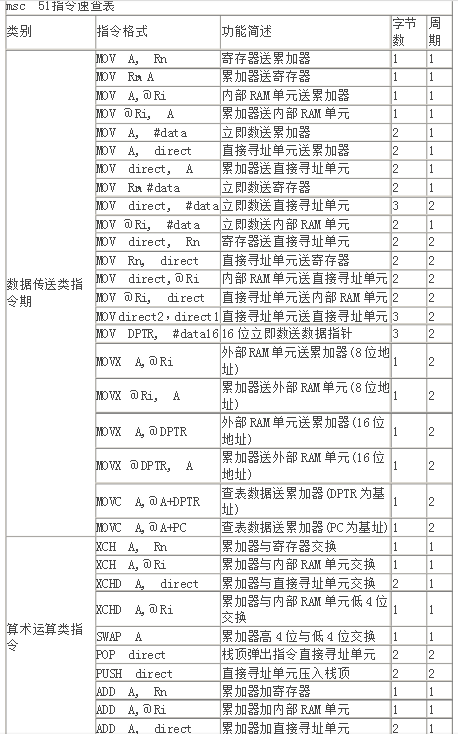
- 单周期指令: 只有一个机器周期的指令,MOV指令,CLR指令等
- 双周期指令:所有的绝对跳转和条件转移指令,均为2周期指令
- 四周期指令:含四个机器周期的指令,MUL、DIV。
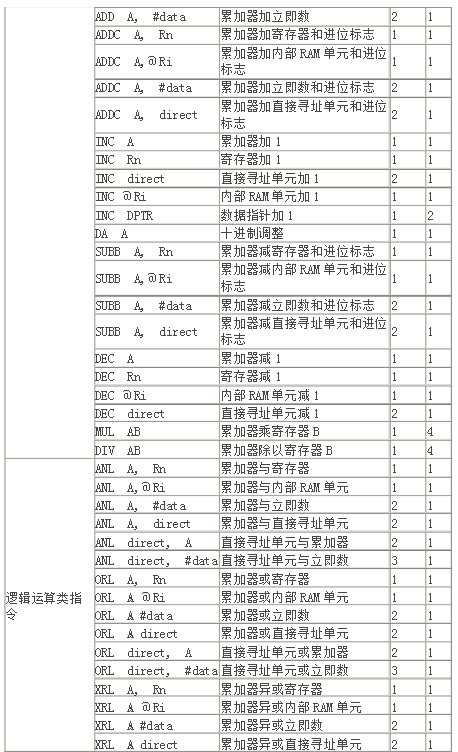
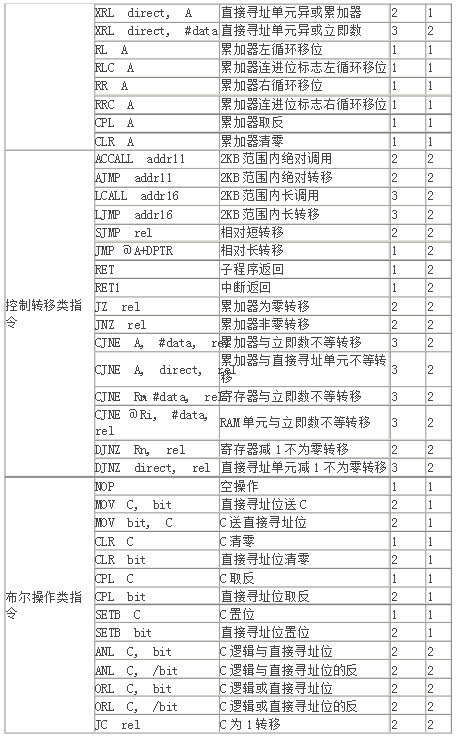
指令表

delay函数
假设单片机时钟频率为12MHz,那么机器周期就为1μs
delay函数:写法1
(实际上char 8bit无法写入333,所以这么写还是有问题)
c语言编译为汇编后的结果:
:---------------------------------源代码-------------------------------------:
33 void delay(void)
34 {
35 1 char j;
36 1 for (j = 1; j <= 110; j++) // 假设这个循环t次,耗时1000机器周期,则 1+3t=1000,则t=(1000-1)/3=333
37 1 ;
38 1 }
:----------------------------------汇编--------------------------------------:
; FUNCTION delay (BEGIN)
; SOURCE LINE # 33
; SOURCE LINE # 34
; SOURCE LINE # 36
;---- Variable 'j' assigned to Register 'R7' ----
0000 7F01 MOV R7,#01H ; 将0x01送到寄存器R7 1个机器周期
0001
0002 ?C0001:
0002 0F INC R7 ; 自增寄存器R7 1个机器周期
0003 BF6FFC CJNE R7,#06FH,?C0001 ; R7中的内容与0x06F=111不等则跳转 2个机器周期
0004 ; SOURCE LINE # 38
0005
0006 ?C0004:
0006 22 RET ; 子程序返回 2个机器周期for循环赋值指令耗时1个周期、自增耗时1个周期、比较耗时2个周期
假设循环t次,耗时1000机器周期,则 1+3t=1000,则t=(1000-1)/3=333
所以可以设计这样一个延时函数
void delay(char second)
{
char j;
for(;--second;){
for (j = 1; j <= 333; j++) // 耗时1ms
}
}delay函数:写法2
(实际上char 8bit无法写入500,所以这么写还是有问题)
更高效的写法:
:---------------------------------源代码-------------------------------------:
19 void delay(void)
20 {
21 1 char j=333;
22 1 for (;--j;); // --j操作耗时2个机器周期,总共耗时2j个机器周期
23 1 }
:----------------------------------汇编--------------------------------------:
C51 COMPILER V9.01 MAIN 06/25/2023 12:19:38 PAGE 2
ASSEMBLY LISTING OF GENERATED OBJECT CODE
; FUNCTION delay (BEGIN)
; SOURCE LINE # 19
; SOURCE LINE # 20
; SOURCE LINE # 21
;---- Variable 'j' assigned to Register 'R7' ----
0000 7F4D MOV R7,#04DH ; 0x4d送到R7寄存器 1个机器周期
; SOURCE LINE # 22
0002 ?C0001:
0002 DFFE DJNZ R7,?C0001 ; 寄存器自减,当不为0时跳转到?C0001: 2个机器周期
0004 ?C0002:
; SOURCE LINE # 23
0004 ?C0003:
0004 22 RET ; 子程序返回 2个机器周期
; FUNCTION delay (END)for循环赋值指令耗时1个周期、循环耗时2t个周期
假设循环t次,耗时1000机器周期,则 1+2t=1000,则t=(1000-1)/2=499.5
所以可以设计这样一个delay函数
void delay(char second)
{
for(;--second;){
char j=500;
for (;--j;); // 耗时1ms
}
}delay函数:写法3
实际上内层循环应该用int,但是用int后的机器周期的计算就没有用char时的那么显而易见了
line level source
1 void delay()
2 {
3 1 int j = 500;
4 1 for (; --j;);
5 1 }
C51 COMPILER V9.01 UTILS 06/26/2023 03:53:57 PAGE 2
ASSEMBLY LISTING OF GENERATED OBJECT CODE
; FUNCTION delay (BEGIN)
; SOURCE LINE # 1
; SOURCE LINE # 2
; SOURCE LINE # 3
;---- Variable 'j' assigned to Register 'R6/R7' ----
0000 7FF4 MOV R7,#0F4H ;初始化低八位
0002 7E01 MOV R6,#01H ;初始化高八位
; SOURCE LINE # 4
0004 ?C0001:
0004 EF MOV A,R7 ;低八位复制到ACC寄存器
0005 1F DEC R7 ;低八位自减
0006 7001 JNZ ?C0004 ;ACC不为0说明低八位没减完了,则跳转到 ?C0004 继续减低八位
0008 1E DEC R6 ;减完了低八位则去减高八位
0009 ?C0004:
0009 14 DEC A ; ACC再次自减,减去低八位
000A 4E ORL A,R6 ; 将累加器A中的数据或上R6中的数据,数据保存在A中
000B 70F7 JNZ ?C0001 ; ACC不为0则说明没减完了,循环
000D ?C0002:
; SOURCE LINE # 5
000D ?C0003:
000D 22 RET
; FUNCTION delay (END)直接给出代码吧
// 12MHz时实现毫秒级延迟的写法
void delay(unsigned int ms)
{
unsigned int i, j;
for (i = ms; i > 0; i--)
for (j = 123; j > 0; j--)
;
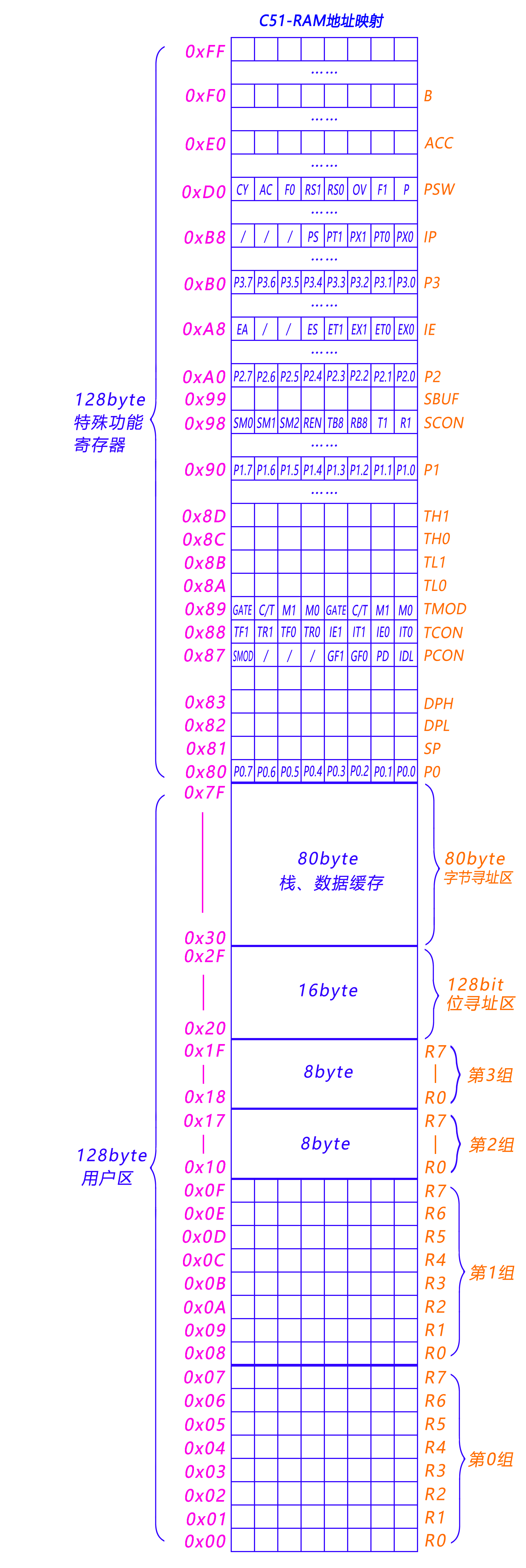
}c51-RAM分布
0x00-0x1F0x20(32)个通用寄存器- 分为0、1、2、3四组
- 每组有R0~R7八个寄存器
- 所以4x8=32个寄存器
0x20-0x2F0x10(16)个支持位寻址的字节数据区0x30-0x7F0x50(80)个字节的用户RAM区- 同时也是栈区
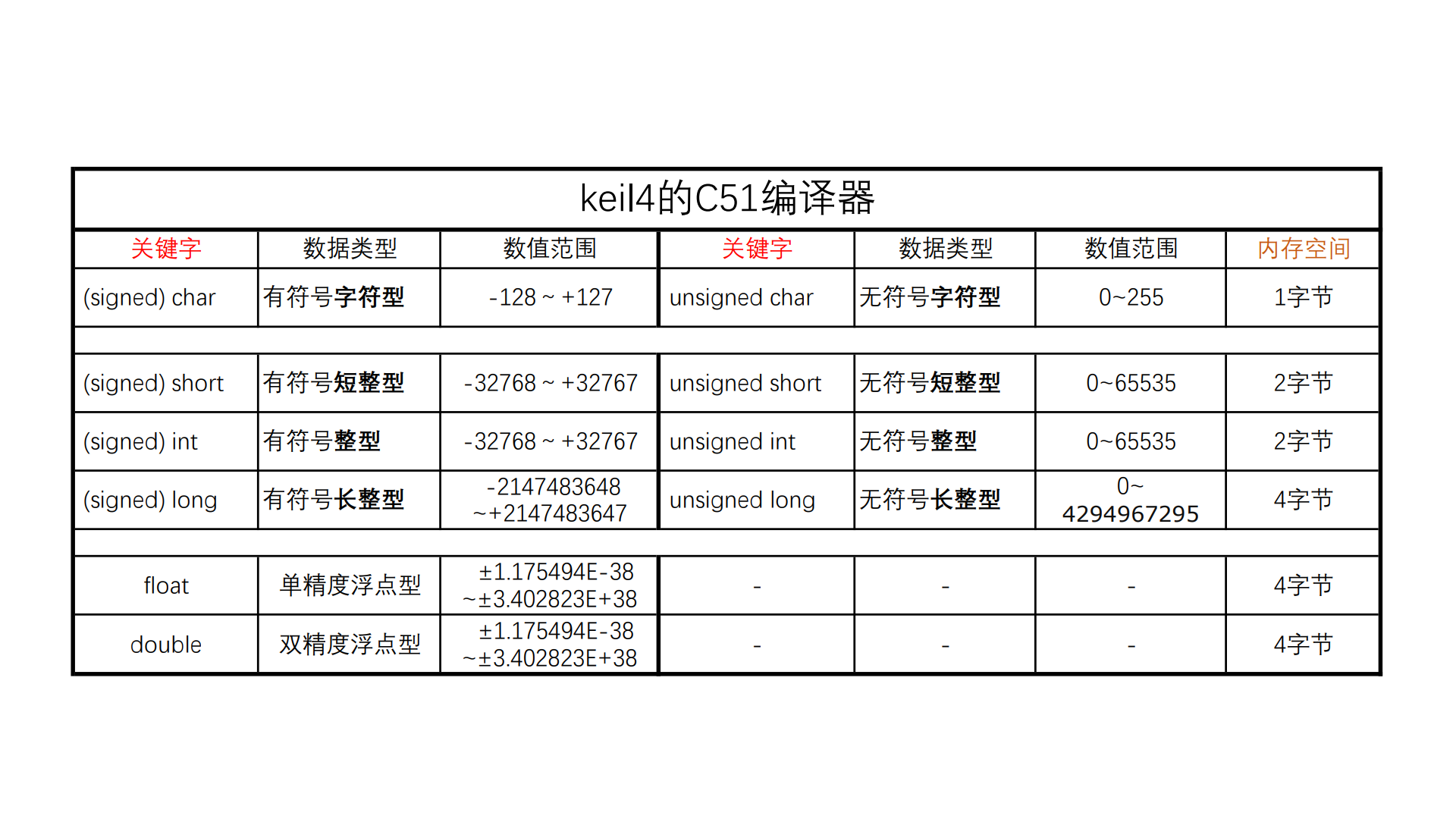
C51-基本数据类型
reg51.h头文件
reg51.h里面主要是一些特殊功能寄存器的地址声明
sfr P1 = 0x90 //这句话表示:P1口所对应的特殊功能寄存器P1在内存中的地址为0x80,
sbit EA = 0xAF; //这句话表示EA这一位的地址为0xAF。sfr关键字
- 特殊功能寄存器(special function register)
- 它并非标准C语言的关键字,而是Keil 为能直接访问80C51中的 SFR 而提供了一个新的关键词,
- 用法:
- sfr 特殊功能寄存器名=地址值
- 用户实际上也可以修改的,如P1=0x80,也可改为A1=0x80
- 但sfr 和地址值则不能更改,否者会编译出错。
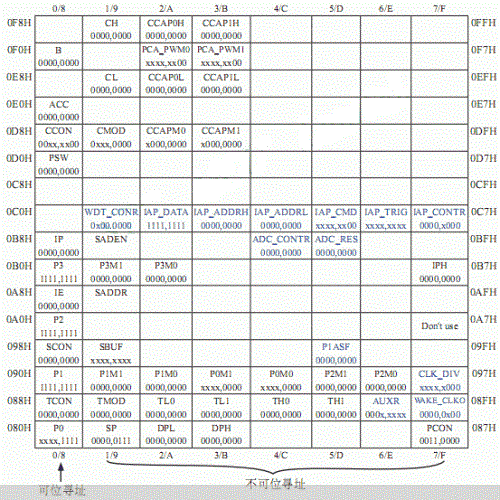
- 特殊功能寄存器布局
- 事实上只有第一列的地址可以位寻址
sbit关键字
- 表示特殊功能寄存器位
- 是非标准C语言的关键字
- 在对寄存器的某一位(必须是可位寻址的特殊功能寄存器才能用)操作时使用
- 如:
- sbit LED = P1^0;
- sbit EA = 0xAF;
- 位定义用法有三种:
- 第一种方法:sbit 位变量名= 寄存器位地址值
- 第二种方法:sbit 位变量名=SFR 名称^寄存器位值(0-7)
- 第三种方法:sbit 位变量名=SFR 地址值^寄存器位值
// sbit 特殊功能寄存器位
// 第一种方法:sbit 位变量名=地址值
// 第二种方法:sbit 位变量名=SFR名称^变量位地址值
// 第三种方法:sbit 位变量名=SFR地址值^变量位地址值
sbit LED = P1 ^ 0;
sbit BUZ = P2 ^ 0;带注释的REG51.H
/*--------------------------------------------------------------------------
REG51.H //REG 就是 Register(寄存器)的意思,对51单片机的操作就是对寄存器的操作
Header file for generic 80C51 and 80C31 microcontroller.
Copyright (c) 1988-2002 Keil Elektronik GmbH and Keil Software, Inc.
All rights reserved.
--------------------------------------------------------------------------------------------
51单片机是8位地址的,用十六进制来表示就是两位十六进制数,所以下面看到的都是两位十六进制的地址
关于位寻址及操作,有个简便方法判断,将字节地址换成10进制后能否被“8”整除,能被“8”整除的就
能进行位操作,不能被“8”整除就不能,如P1地址为90H,10进制为144 144/8=18,能被整除,所以可以位
操作。再如TMOD地址为89H, 10进制为137 137/8=17.125,不能被整除,所以不可以位操作。
--------------------------------------------------------------------------------------------*/
#ifndef __REG51_H__ //如果没有定义__REG51_H__,那么定义它
#define __REG51_H__
/* BYTE Register */
/* -------------------------------------------------
sfr 是 special function register,特殊功能寄存器
-------------------------------------------------*/
sfr P0 = 0x80; // P0口
sfr P1 = 0x90; // P1口
sfr P2 = 0xA0; // P2口
sfr P3 = 0xB0; // P3口
sfr PSW = 0xD0; // Program Status Word,程序状态字
sfr ACC = 0xE0; // 累加器
sfr B = 0xF0; // 乘除法辅助寄存器
sfr SP = 0x81; // Stack Point,堆栈指针
sfr DPL = 0x82; // 数据指针(低8位)
sfr DPH = 0x83; // 数据指针(高8位)
sfr PCON = 0x87; // Power Control,电源控制和波特率选择
sfr TCON = 0x88; // Timer Controller 定时器控制
sfr TMOD = 0x89; // Timer Mode 定时器方式控制寄存器,不可寻址
sfr TL0 = 0x8A; // 定时器0低8位
sfr TL1 = 0x8B; // 定时器1低8位
sfr TH0 = 0x8C; // 定时器0高8位
sfr TH1 = 0x8D; // 定时器1高8位
sfr IE = 0xA8; // Interrupt Enable 中断使能
sfr IP = 0xB8; // Interrupt Priority 中断优先级控制
sfr SCON = 0x98; // Seriel Controller 串行口控制寄存器,监视和控制51 芯片串行口的工作状态
sfr SBUF = 0x99; // Serial Buffer,串行数据收/发缓冲器
/* BIT Register */
/* PSW Program Status Word 程序状态字 */
/* ---------------------------------------------------------------------------------------------
sbit定义特殊功能寄存器的位变量,映射到IO口(P1^1这种IO口的“位”)
bit和int char差不多,只不过char=8位, bit=1位而已。都是变量,编译器在编译过程中分配地址。
除非指定,否则这个地址是随机分配的。这个地址是整个可寻址空间,RAM+FLASH+扩展空间。bit只
有0和1两种值,和Windows下VC中的BOOL类似。
---------------------------------------------------------------------------------------------*/
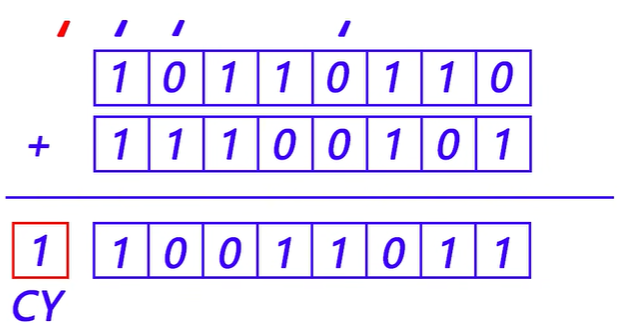
sbit CY = 0xD7; /* PSW.7,carry,进位标志,在执行加减运算指令时,如果运算结果的最高位(D7)
发生了进位或借位,则CY由硬件自动置1。*/
sbit AC = 0xD6; /* PSW.6,assistant carry,半进位标志位,也称为辅助标志位。在执行加减运算指令时,如
果运算结果的低半字节(D3)发生了向高半字节进位或借位,则AC由硬件自动置1。*/
sbit F0 = 0xD5; /* PSW.5,用户标志位。用户可以根据需要对F0、F1赋予一定的含义,由用户置1和清0,作为软件标
志。 */
sbit RS1 = 0xD4; /* PSW.4,工作寄存器组选择控制位。通过对这两位设定,可以从4个工作寄存器组中选择一组作为当
前工作寄存器。 */
sbit RS0 = 0xD3; // PSW.3
sbit OV = 0xD2; /* PSW.2,overflow,溢出标志位,有两种情况影响该位。一是执行加减运算时,如果D7或
D6任一位,并且只一位发生了进位或借位,则OV自动置1 */
/* sbit F1 = 0xD1 */ //这个原来的头文件是没有的,自己加上去的,和 F0 作用一样
sbit P = 0xD0; /* PSW.1,奇偶标志位。每条指令执行完后,该位都会指示当前累加器A中1的个数。如果A中有奇数
个1,则P自动置1。*/
/* TCON Timer Controller 定时器控制 */
sbit TF1 = 0x8F; // Timer1 Flag,T1中断标志位
sbit TR1 = 0x8E; // Timer1 Run,T1运行控制位
sbit TF0 = 0x8D; // Timer0 Flag,T0中断标志位
sbit TR0 = 0x8C; // Timer0 Run,T0运行控制位
sbit IE1 = 0x8B; // Interrupt1 Exterior,外部中断1中断标志位
sbit IT1 = 0x8A; // Interrupt1 Touch,外部中断1 触发方式选择位
sbit IE0 = 0x89; // Interrupt0 Exterior,外部中断0中断标志位
sbit IT0 = 0x88; // Interrupt0 Touch,外部中断0触发方式选择位
/* IE Interrupt Enable 中断使能 */
sbit EA = 0xAF; // IE.7,Enable All Interrupt,中断总允许位
sbit ES = 0xAC; // IE.4,Enable Serial,串行口中断允许位
sbit ET1 = 0xAB; // IE.3,Enable Timer 1,T1中断允许位
sbit EX1 = 0xAA; // IE.2, Enable Exterior 1,外部中断1中断允许位
sbit ET0 = 0xA9; // IE.1,Enable Timer 0,T0中断允许位
sbit EX0 = 0xA8; // IE.0,Enable Exterior 0,外部中断0中断允许位
/* IP Interrupt Priority 中断优先级控制 */
sbit PS = 0xBC; // IP.4,Priority Serial 串口优先级标志位
sbit PT1 = 0xBB; // IP.3,Priority Timer 1 定时器1优先级标志位
sbit PX1 = 0xBA; // IP.2,Priority Exterior 1 外部中断1优先级标志位
sbit PT0 = 0xB9; // IP.1,Priority Timer 0 定时器0优先级标志位
sbit PX0 = 0xB8; // IP.0,Priority Exterior 0 外部中断0优先级标志位
/* P3 */
sbit RD = 0xB7; // Read Data,读数据
sbit WR = 0xB6; // Write Data,写数据
sbit T1 = 0xB5; // Timer 1,定时器1,由TMOD的高四位控制
sbit T0 = 0xB4; // Timer 0,定时器0,由TMOD的低四位控制
sbit INT1 = 0xB3; // Interrupt 1,中断1
sbit INT0 = 0xB2; // Interrupt 0,中断0
sbit TXD = 0xB1; // Receive Data,串口接收端
sbit RXD = 0xB0; // Transmit Data,串口发送端
/* SCON Seriel Controller 串行口控制 */
sbit SM0 = 0x9F; // SM0和SM1组成4种工作方式,对应有不同特性
sbit SM1 = 0x9E; //
sbit SM2 = 0x9D; /* 多机通信控制位。多机通信是工作于方式2和方式3,SM2位主要用于方式2和方式3。
接收状态,当串行口工作于方式2或3,以及SM2=1时,只有当接收到第9位数据(RB8)
为1时,才把接收到的前8位数据送入SBUF,且置位RI发出中断申请,否则会将接受
到的数据放弃。当SM2=0时,就不管第位数据是0还是1,都难得数据送入SBUF,并发
出中断申请。工作于方式0时,SM2必须为0。*/
sbit REN = 0x9C; // Receive Enable,使能接收
sbit TB8 = 0x9B; // 发送接收数据位8
sbit RB8 = 0x9A; // 接收数据位8
sbit TI = 0x99; // 发送中断标志位
sbit RI = 0x98; // 接收中断标志位
#endifCY进位寄存器
REG51.H
/*--------------------------------------------------------------------------
REG51.H
sbit CY = PSW^7; // 溢出位LED流水灯实现
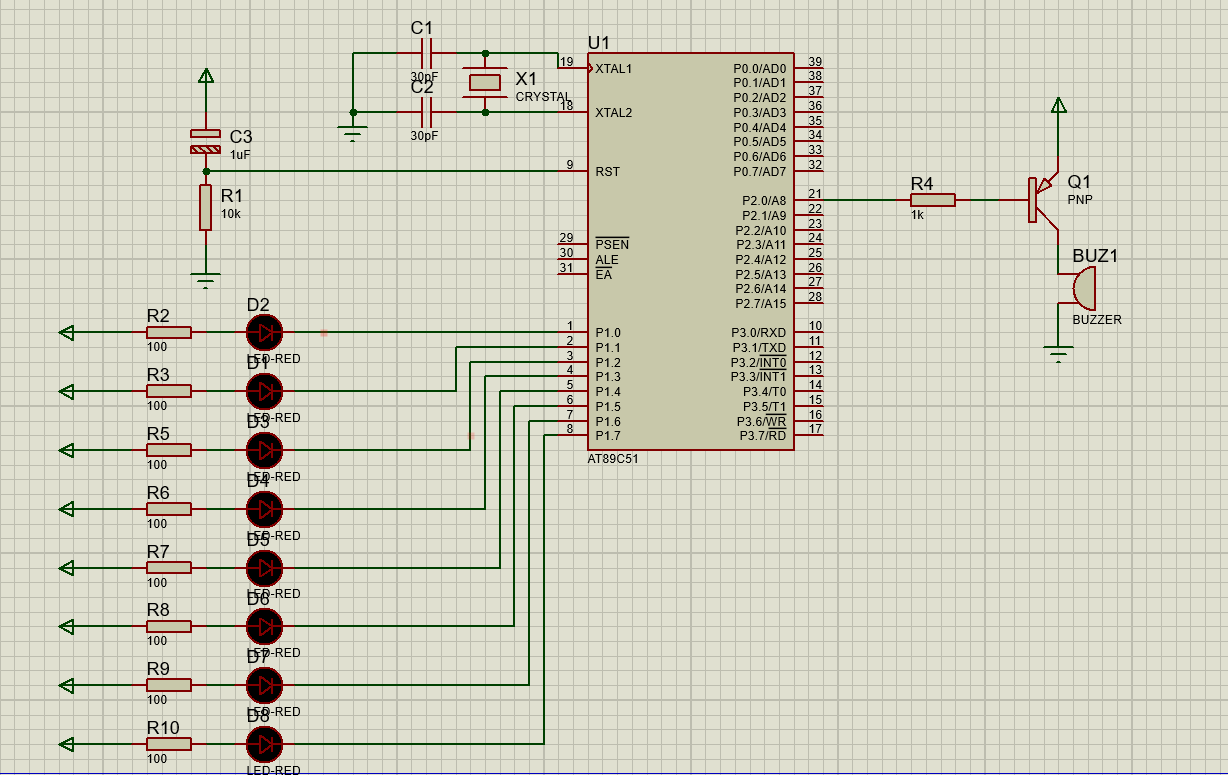
#include <REG51.H>
#include "utils.h"
sfr LED = 0x90; // P1
sbit BUZ = P2 ^ 0;
unsigned char LED_STATE[] = {
1 << 0, //00000001 0x01
1 << 1, //00000010 0x02
1 << 2, //00000100 0x04
1 << 3, //00001000 0x08
1 << 4, //00010000 0x10
1 << 5, //00100000 0x20
1 << 6, //01000000 0x40
1 << 7, //10000000 0x80
1 << 8, //00000000 0x00
};
void main()
{
while (1) {
char i;
for (i = 0; i < 8; i++) {
LED = ~LED_STATE[i];
BUZ = ~BUZ;
delay(1000);
}
}
}// 12MHz时实现毫秒级延迟的写法
void delay(unsigned int ms)
{
unsigned int i, j;
for (i = ms; i > 0; i--)
for (j = 123; j > 0; j--) ;
}1位数数码管驱动实现
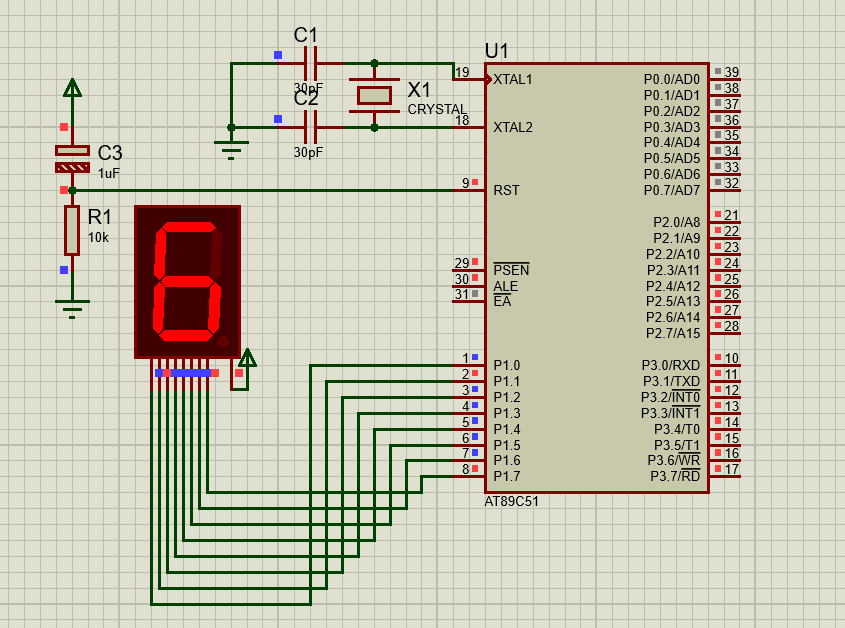
#include "REG52.H"
#include "utils.h"
sfr LED = 0x90; // P1口
uint8_t SEG7_CODE_CC[] = {0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f}; // 共阴极七段数码管0~9数字
void main()
{
uint8_t num = 1;
while (1) {
uint8_t i;
for (i = 0; i < 10; i++) {
LED = ~SEG7_CODE_CC[i];
delay(500);
}
}
}#ifndef _UTILS_
#define _UTILS_
typedef unsigned char uint8_t;
typedef unsigned int uint16_t;
typedef unsigned long uint32_t;
typedef signed char int8_t;
typedef signed int int16_t;
typedef signed long int32_t;
#define EXT0_VECTOR 0 /* 0x03 external interrupt 0 */
#define TIM0_VECTOR 1 /* 0x0b timer 0 */
#define EXT1_VECTOR 2 /* 0x13 external interrupt 1 */
#define TIM1_VECTOR 3 /* 0x1b timer 1 */
#define UART0_VECTOR 4 /* 0x23 serial port 0 */
void delay(unsigned int);
#endif多位数码管驱动实现
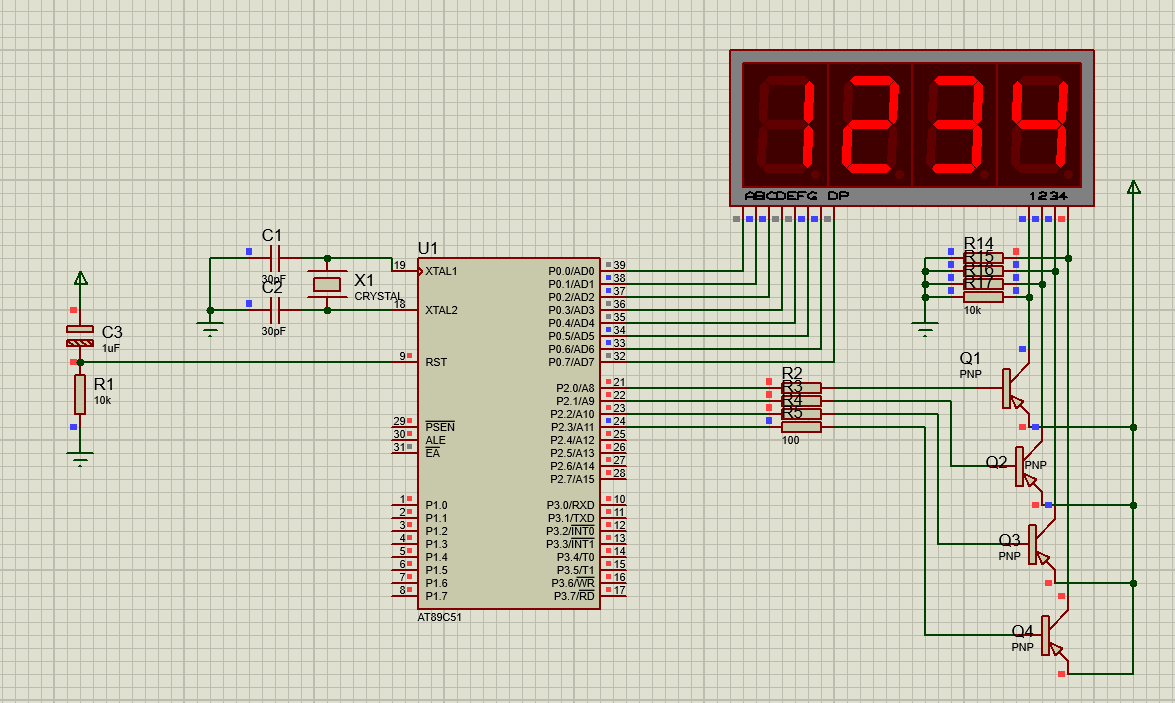
#include "REG52.H"
#include "utils.h"
// 共阴极七段数码管0~9数字段选信号
uint8_t SEG7_CODE_CC[] = {0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f};
uint8_t SEG_MASK[] = {0x01, 0x02, 0x04, 0x08};
uint8_t NUM[] = {1, 2, 3, 4};
void display()
{
uint8_t i;
for (i = 0; i < 4; i++) {
P0 = ~SEG7_CODE_CC[NUM[i]];
P2 = ~SEG_MASK[i];
delay(1);
P0 = 0xff; // 关闭段选 一定要初始化,否则将导致第n位显示在第n-1位上
P2 = 0xff; // 关闭位选 一定要初始化
}
}
void main()
{
while (1) {
display();
}
}#ifndef _UTILS_
#define _UTILS_
typedef unsigned char uint8_t;
typedef unsigned int uint16_t;
typedef unsigned long uint32_t;
typedef signed char int8_t;
typedef signed int int16_t;
typedef signed long int32_t;
// 共阴极七段数码管0~9数字段选信号
uint8_t SEG7_CODE_CC[] = {0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f};
void delay(unsigned int);
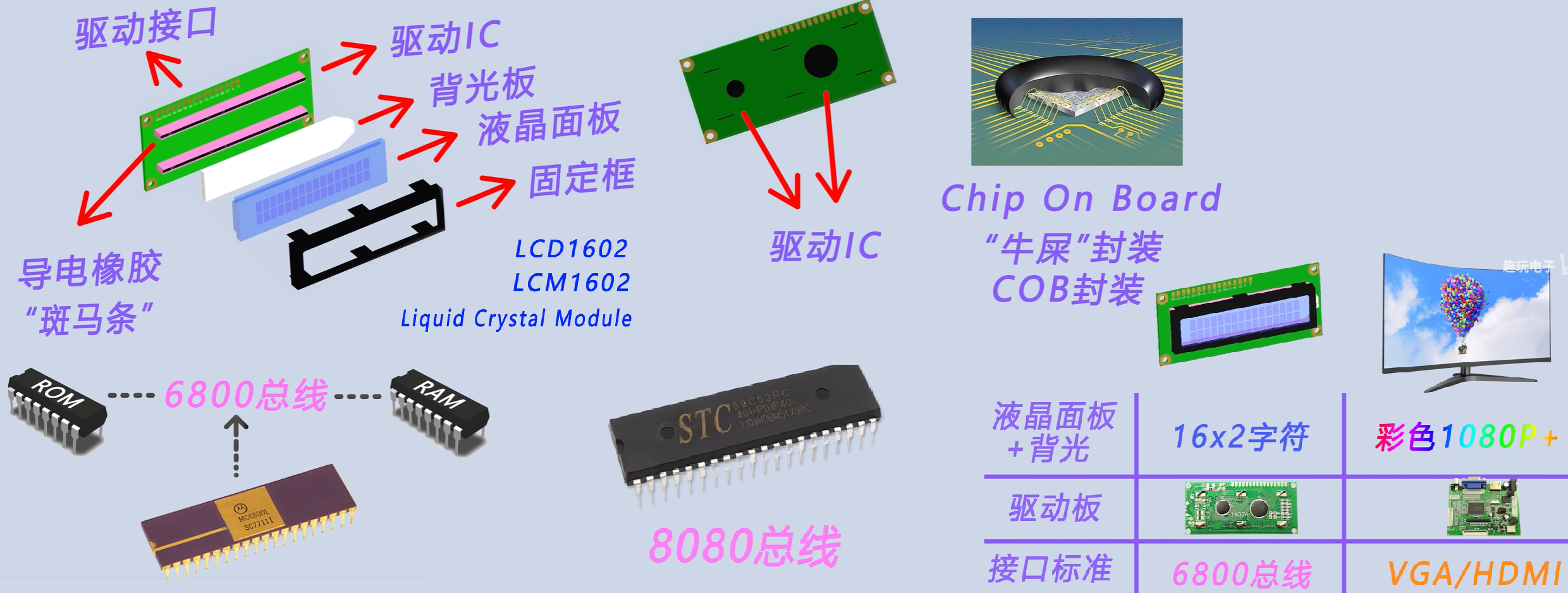
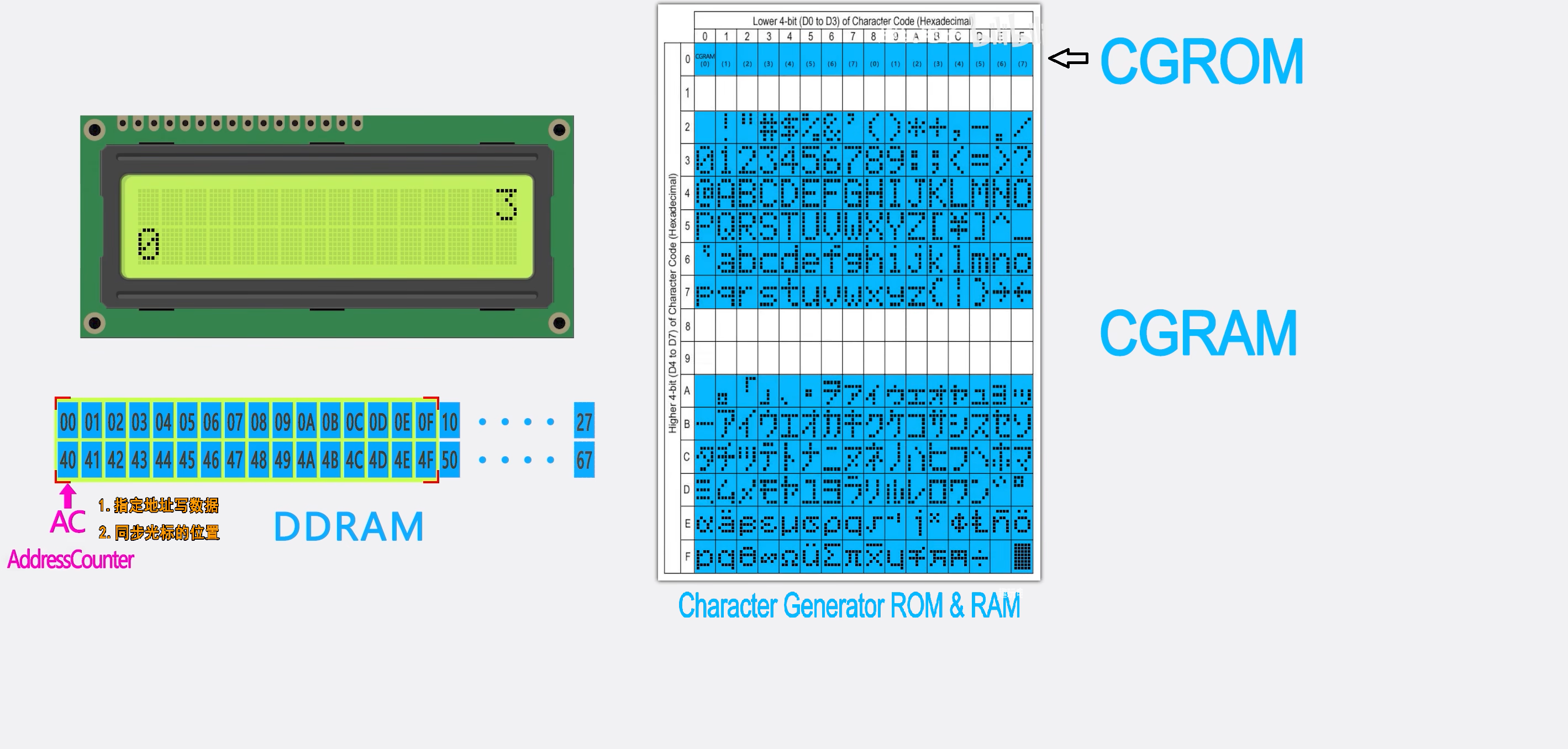
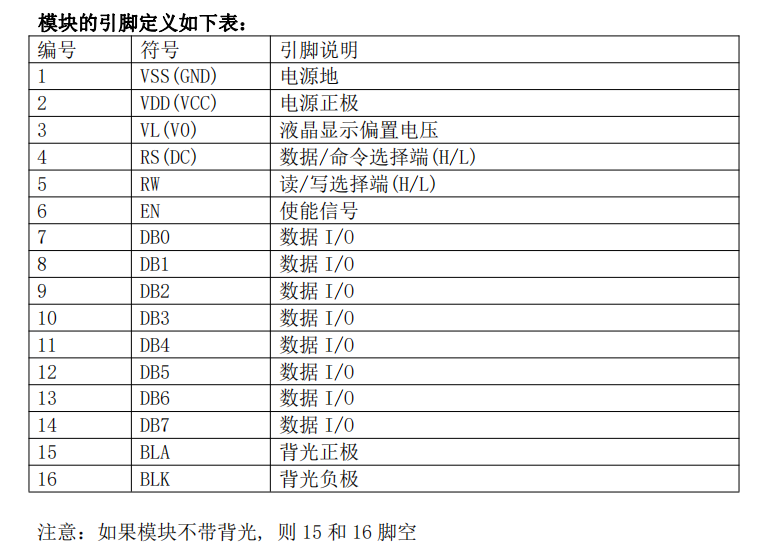
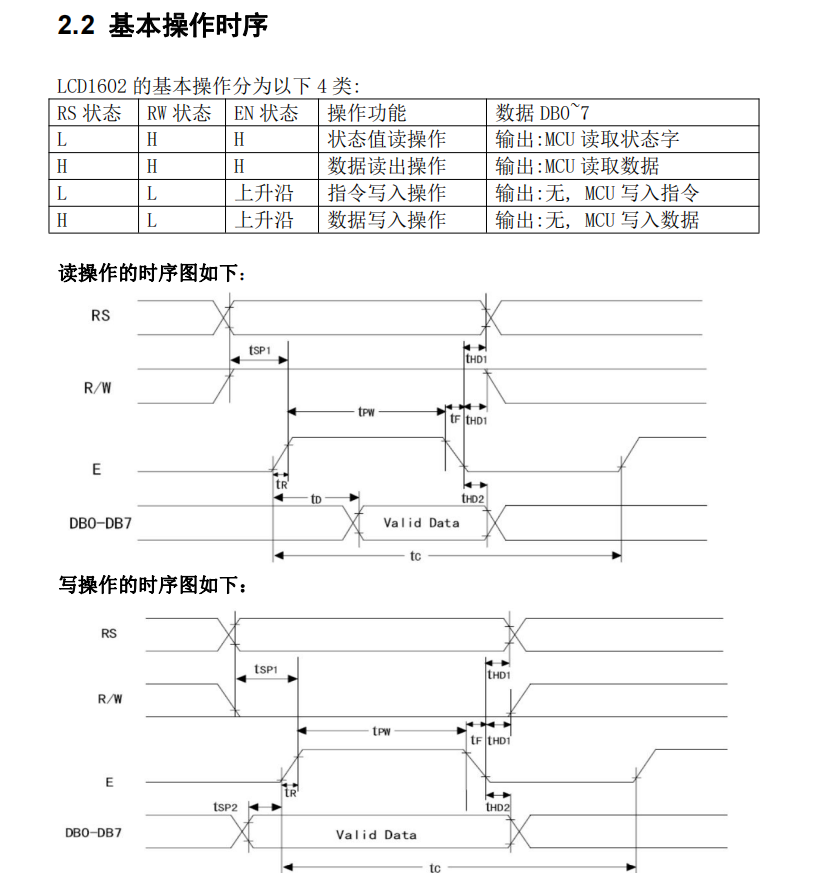
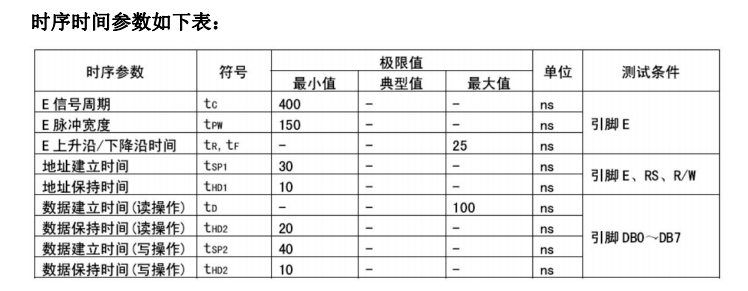
#endifLCD1602(LCM1602)驱动编写
1602.h
#ifndef __LCD_1602_H_
#define __LCD_1602_H_
#include "utils.h"
void LCD_Init();
void LCD_Clear();
void LCD_Cusor_Init();
void LCD_Cusor_GoToXY(int8_t _x, int8_t _y);
uint8_t LCD_CGRAM_ADD_GET();
void LCD_DDRAM_ADD_SET(uint8_t _addr);
void LCD_PutChar(uint8_t _char);
void LCD_PutString(uint8_t *_str);
void LCD_PutNumWithSign(int16_t _num);
void LCD_PutHexWith0x(uint16_t _hex);
void LCD_LoadCustomChar(uint8_t _idx_CGRAM, uint8_t _data[8]);
void LCD_ShowCustomChar(uint8_t _idx);
void LCD_Cusor_Show_UnderLine(uint8_t _show);
void LCD_Cusor_Flash(uint8_t _flash);
void LCD_Scroll_Cusor_Step(uint8_t _dir);
void LCD_Scroll_View_Step(uint8_t _dir);
void LCD_View_Auto_Scroll(uint8_t _scrollable);
void LCD_AC_Positive_Increase(uint8_t _increase);
void LCD_Test();
#endif1602.c
// 低级接口
#include "utils.h"
#include "REG51.H"
// ----------------------------------------------端口定义----------------------------------------------
#define LCD_DATA P0 // LCD数据8bit端口
sbit LCD_BF = LCD_DATA ^ 7; // 数据位的第七位为读/写允许位,进行读写操作前,要确认该位值为 0 才可进行操作
sbit LCD_RS = P2 ^ 0; // 数据/命令选择端(H/L)
sbit LCD_RW = P2 ^ 1; // 读/写选择端(H/L)
sbit LCD_EN = P2 ^ 2; // 使能信号
// ----------------------------------------------常量定义----------------------------------------------
enum LCD_BF_Enum {
Lazy = 0,
Busy = 1
};
enum LCD_RW_Enum {
Write = 0,
Read = 1
};
enum LCD_RS_Enum {
CMD = 0,
DATA = 1
};
enum LCD_EN_Enum {
Disable = 0,
Enable = 1
};
enum LCD_Bool_Enum {
False = 0,
True = 1
};
// ----------------【忙等待、读取、写入】三个基本操作的实现--------------------------------
// 基本操作:等待LCD可以读写数据
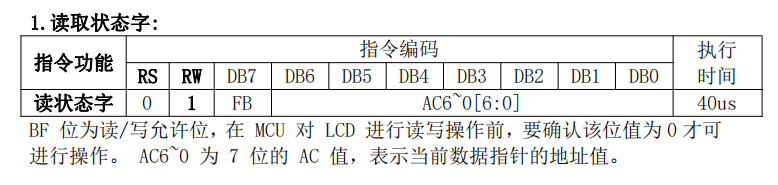
// 功能:读取BF状态字、AC地址(最高位为BF状态字,可判断是否忙)
// BF 位为读/写允许位,在 MCU 对 LCD 进行读写操作前,要确认该位值为 0 才可进行操作。
uint8_t LCD_WaitNoBusy()
{
uint8_t AC_Add;
LCD_BF = Busy; // 预先拉高BF信号
do { // 循环、直到BF为低电平
LCD_EN = Disable; // 拉低使能信号
LCD_RW = Read; // 读取操作
LCD_RS = CMD; // 读取命令
delay_2us(1); // 延时
LCD_EN = Enable; // 拉高使能
delay_2us(1); // 延时
} while (LCD_BF == Busy); // LCD_BF==1 说明忙
AC_Add = LCD_DATA; // 获取AC地址;
LCD_EN = Disable; // 拉低使能
return AC_Add; // 返回AC地址
}
// 基本操作:写操作(数据或命令)
void LCD_Put(uint8_t _CMD_OR_DATA, uint8_t _data) // 传入指令或数据
{
LCD_WaitNoBusy();
LCD_EN = Disable; // EN低电平
LCD_RW = Write; // 写入操作
LCD_RS = _CMD_OR_DATA; // 数据类型:指令?数据?
LCD_DATA = _data; // 准备数据
delay_2us(1); // 延时
LCD_EN = Enable; // 给一个上升沿,让LCD读取数据
delay_2us(1); // 延时
LCD_EN = Disable;
}
// 基本操作:读操作(数据或命令)
uint8_t LCD_Get(uint8_t _CMD_OR_DATA)
{
uint8_t res;
LCD_WaitNoBusy();
LCD_EN = Disable; // EN低电平
LCD_RW = Read; // 读取操作
LCD_RS = _CMD_OR_DATA; // 数据类型:指令?数据?
delay_2us(1); // 延时
LCD_EN = Enable; // 给一个高电平使能
delay_2us(1); // 延时
res = LCD_DATA; // 读取数据
LCD_EN = Disable; // 拉低使能
return res; // 返回结果
}
// -------------- ----【写入命令、写入数据、读取命令、读取数据】四个基本操作的宏定义---------------------------
#define LCD_PutCmd(_cmd) LCD_Put(CMD, _cmd)
#define LCD_PutDat(_data) LCD_Put(DATA, _data)
#define LCD_GetCmd() LCD_Get(CMD)
#define LCD_GetDat() LCD_Get(DATA)
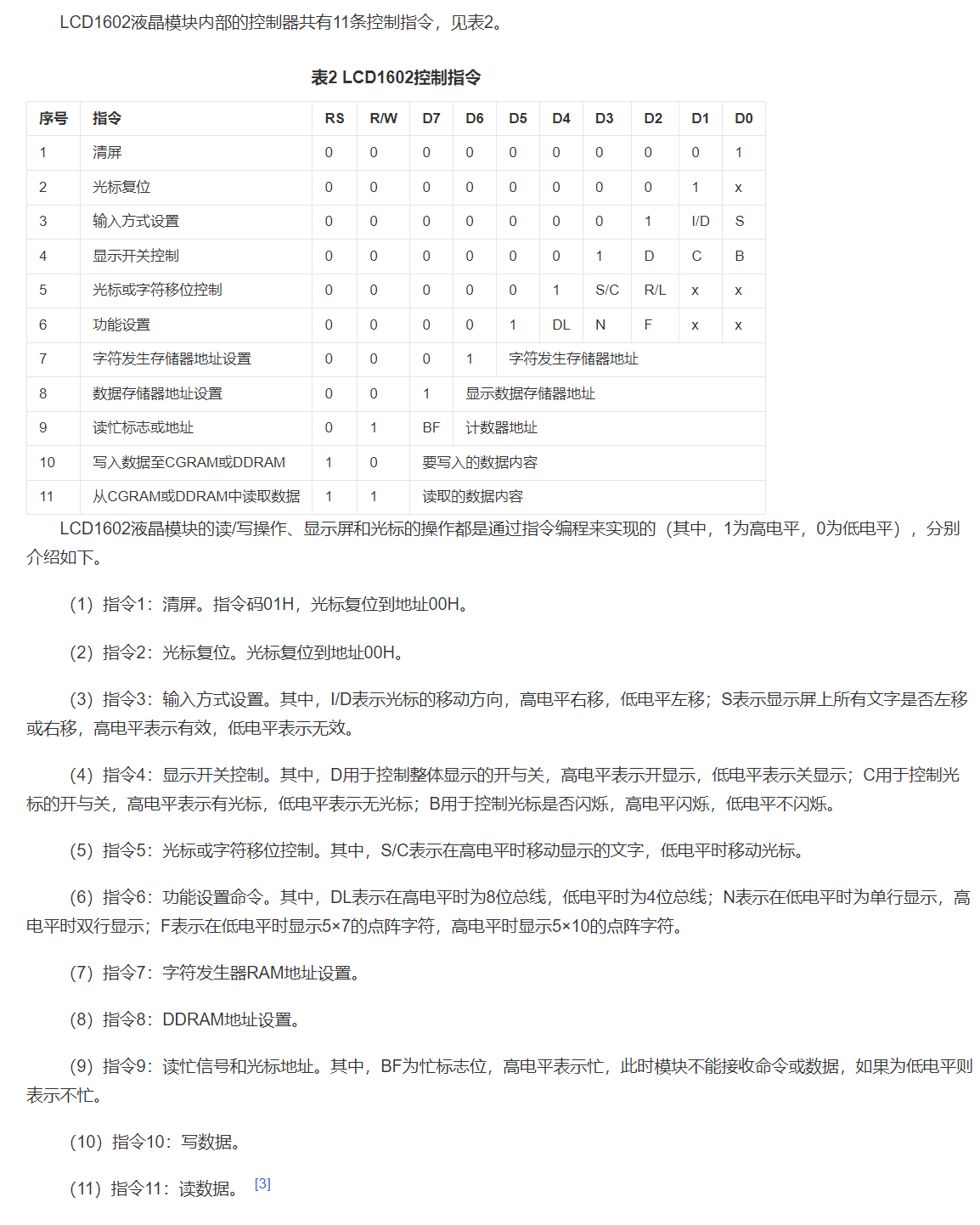
// ----------------------------------8条命令的定义(实际上也保存了状态)------------------------------------
uint8_t CMD_CLEAR = 0x01; // 清屏指令 光标复位到地址00H
uint8_t CMD_CLEAC = 0x02; // 光标归位指令 (使AC清零,光标归位
uint8_t CMD_ENTER = 0x04; // 输入方式设置指令 (该指令的功能在于设置显示字符的进入方式,即在对 DDRM 操作数据写入/读出后,AC 数据地址指针的修改方式)
uint8_t CMD_STATE = 0x08; // 显示状态设置指令 (该指令控制着画面、光标和闪烁的开与关)
uint8_t CMD_SCROL = 0x10; // 画面或光标滚动设置指令
uint8_t CMD_RMODE = 0x20; // 工作方式设置指令
uint8_t CMD_CGADR = 0x40; // 设定 CGRAM 地址设置指令
uint8_t CMD_DDADR = 0x80; // 设置 DDRAM 地址设置指令 (也可理解为修改 AC 指针位置
// ------------------------------低级功能接口实现-------------------------------------
// 工作方式设置
void LCD_RunMode()
{
// 设置控制器与 MCU 的接口形式为数据总线宽度为 8 位,设置显示字符的行数为 2 行字符,设置显示字符的字体为 5X8 点阵字符体
LCD_PutCmd(CMD_RMODE | 0x18);
}
// 画面显示
void LCD_Open(uint8_t _open)
{
if (_open)
CMD_STATE |= 0x04;
else
CMD_STATE &= ~0x04;
LCD_PutCmd(CMD_STATE);
}
// 光标下划线显示
void LCD_Cusor_Show_UnderLine(uint8_t _show)
{
if (_show)
CMD_STATE |= 0x02;
else
CMD_STATE &= ~0x02;
LCD_PutCmd(CMD_STATE);
}
// 光标闪烁
void LCD_Cusor_Flash(uint8_t _flash)
{
if (_flash)
CMD_STATE |= 0x01;
else
CMD_STATE &= ~0x01;
LCD_PutCmd(CMD_STATE);
}
// 光标滚动一步
void LCD_Scroll_Cusor_Step(uint8_t _dir)
{
CMD_SCROL &= ~0x08; // 保证第四位是0
if (_dir == 'R' || _dir == 'r')
CMD_SCROL |= 0x04;
else
CMD_SCROL &= ~0x04;
LCD_PutCmd(CMD_SCROL);
}
// 画面滚动
void LCD_Scroll_View_Step(uint8_t _dir)
{
CMD_SCROL |= 0x08;
if (_dir == 'R' || _dir == 'r')
CMD_SCROL |= 0x04;
else
CMD_SCROL &= ~0x04;
LCD_PutCmd(CMD_SCROL);
}
// 在对DDRM 操作数据写入/读出后,AC 数据地址指针自增还是自减。
void LCD_AC_Positive_Increase(uint8_t _increase)
{
if (_increase)
CMD_ENTER |= 0x02;
else
CMD_ENTER &= ~0x02;
LCD_PutCmd(CMD_ENTER);
}
// 在对 DDRM 写入数据后画面是否同步滚动(显示屏上所有文字是否左移或右移)
void LCD_View_Auto_Scroll(uint8_t _scrollable)
{
if (_scrollable)
CMD_ENTER |= 0x01;
else
CMD_ENTER &= ~0x01;
LCD_PutCmd(CMD_ENTER);
}
// 清屏指令,同时光标复位到地址00H
void LCD_Clear()
{
LCD_PutCmd(CMD_CLEAR);
}
// 光标归位指令
void LCD_Cusor_Init()
{
LCD_PutCmd(CMD_CLEAC);
}
// 设定 CGRAM 地址设置
void LCD_CGRAM_ADD_SET(uint8_t _col, uint8_t _row)
{
_col = (_col & 0x07) << 3;
_row = _row & 0x7; // 只要最低三位
CMD_CGADR &= ~0x3f; // 擦除上一次的6bit数据
CMD_CGADR = CMD_CGADR | _col | _row;
LCD_PutCmd(CMD_CGADR);
}
// 获取DDRAM(AC)地址
uint8_t LCD_CGRAM_ADD_GET()
{
return LCD_WaitNoBusy();
}
// 设定 DDRAM(AC) 地址设置
void LCD_DDRAM_ADD_SET(uint8_t _addr)
{
CMD_DDADR &= ~0x7f; // 擦除上一次的7bit数据
CMD_DDADR |= _addr;
LCD_PutCmd(CMD_DDADR);
}
// 向 DDRAM 或 CGRAM 写入数据
void LCD_CGRAM_DDRAM_Put_Data(uint8_t _data)
{
LCD_PutDat(_data);
}
// 从 DDRAM 或 CGRAM 读回数据
uint8_t LCD_CGRAM_DDRAM_Get_Data()
{
return LCD_GetDat();
}
// ---------------------------------高级功能接口实现-----------------------------------------------------------
// 初始化
void LCD_Init()
{
LCD_RunMode();
LCD_Clear();
LCD_Cusor_Init();
LCD_AC_Positive_Increase(True); // 开启写入后自增AC
LCD_View_Auto_Scroll(False); // 关闭写入后自动滚动
LCD_Open(True); // 开显示
}
/*------------------------------------------------------
DDRAM
x= 0 1 2 3 4...................0x27
____________________________________
y=0 | 00 01 02 03 04 05 06 07 ....... 27 |
y=1 | 40 41 42 43 44 45 46 47 ....... 67 |
------------------------------------------------------*/
// 跳转到指定位置(支持负数反向定位) x∈[0,0x27] y∈[0,1] 可以使用-1表示最后一位,-2表示最后第二位
void LCD_Cusor_GoToXY(int8_t _x, int8_t _y)
{
uint8_t addr;
_x = (_x % 0x28 + 0x28) % 0x28; // 使其可以使用-1定位到最后一个位置
_y = (_y % 0x02 + 0x02) % 0x02;
addr = _y * 0x40 + _x;
LCD_DDRAM_ADD_SET(addr);
}
// 输出一个字符
void LCD_PutChar(uint8_t _char)
{
LCD_CGRAM_DDRAM_Put_Data(_char);
}
// 输出字符串
void LCD_PutString(uint8_t *_str)
{
while (*_str) LCD_PutChar(*_str++);
}
// 递归输出无符号数
void LCD_PutNum(uint16_t _num) reentrant // reentrant 关键字用于保证可以递归
{
if (_num / 10) LCD_PutNum(_num / 10);
LCD_PutChar(_num % 10 + '0');
}
// 输出有符号数
void LCD_PutNumWithSign(int16_t _num)
{
if (_num < 0) {
_num = -_num;
LCD_PutChar('-');
}
LCD_PutNum(_num);
}
// 输出一位十六进制字符
void LCD_PutOneHex(uint8_t _hex)
{
uint8_t temp = _hex % 16;
if (temp < 9) LCD_PutChar(temp + '0');
else LCD_PutChar(temp - '9' + 'A');
}
// 输出一个十六进制数
void LCD_PutHex(uint16_t _hex) reentrant
{
if (_hex / 16) LCD_PutHex(_hex / 16);
LCD_PutOneHex(_hex % 16);
}
// 输出一个十六进制数,带0x格式
void LCD_PutHexWith0x(uint16_t _hex)
{
LCD_PutString("0x");
LCD_PutHex(_hex);
}
// 加载自定义字符
void LCD_LoadCustomChar(uint8_t _idx_CGRAM, uint8_t _data[8])
{
uint8_t _row;
for (_row = 0; _row < 8; _row++) {
LCD_CGRAM_ADD_SET(_idx_CGRAM, _row);
LCD_CGRAM_DDRAM_Put_Data(_data[_row]);
}
}
// 输出自定义字符
void LCD_ShowCustomChar(uint8_t _idx)
{
_idx &= 0x0f; // 只要低四位地址
LCD_CGRAM_DDRAM_Put_Data(_idx);
}
void LCD_Test()
{
uint8_t i;
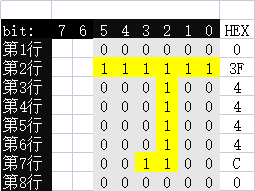
uint8_t ding[] = {0x00, 0x3F, 0x04, 0x04, 0x04, 0x04, 0x0C, 0x00};
LCD_Cusor_GoToXY(0, 0);
// 开启测试
LCD_Open(True);
// LCD_Open(False);
LCD_Cusor_Show_UnderLine(True);
// LCD_Cusor_Show_UnderLine(False);
LCD_Cusor_Flash(True);
// LCD_Cusor_Flash(False);
LCD_AC_Positive_Increase(True); // 写入后自动移动AC位置
LCD_View_Auto_Scroll(True); // 写入后自动滚动
LCD_Scroll_View_Step('R'); // LCD右滚动
LCD_Scroll_View_Step('R'); // LCD右滚动
LCD_Scroll_View_Step('R'); // LCD右滚动
LCD_Scroll_View_Step('R'); // LCD右滚动
LCD_Scroll_View_Step('R'); // LCD右滚动
LCD_Scroll_View_Step('R'); // LCD右滚动
LCD_Scroll_View_Step('R'); // LCD右滚动
LCD_Cusor_GoToXY(0, 0);
LCD_PutString("A");
delay_ms(1000);
LCD_LoadCustomChar(1, ding);
LCD_Cusor_GoToXY(1, 0);
LCD_ShowCustomChar(1);
delay_ms(1000);
LCD_PutChar(' ');
delay_ms(1000);
LCD_PutNumWithSign(-123);
LCD_View_Auto_Scroll(False); // 写入时是否允许AC移动
delay_ms(1000);
// LCD_OP_DDRM_AC_Increase(False);// 关闭写入后自动移动位置
LCD_PutChar(' ');
delay_ms(1000);
LCD_PutHexWith0x(0x80);
delay_ms(1000);
LCD_Cusor_GoToXY(-1, -1); // 负数坐标测试
LCD_PutChar('E');
LCD_Cusor_GoToXY(5, 1);
i = 5;
while (i--) {
LCD_Scroll_Cusor_Step('R'); // 光标右移
LCD_Scroll_View_Step('L'); // LCD左滚动
delay_ms(500);
}
i = 5;
while (i--) {
LCD_Scroll_Cusor_Step('L'); // 光标左移
LCD_Scroll_View_Step('R'); // LCD右滚动
delay_ms(500);
}
}utils.h
#include "utils.h"
void delay_ms(uint16_t ms) // ms_delay when T=12MHz
{
uint16_t i, j;
for (i = ms; i > 0; i--)
for (j = 123; j > 0; j--) // 耗时1ms
;
}
// T=12Mhz 一个机器周期=1us
void delay_2us(uint8_t _2us)
{
// 耗时2t个机器周期
while (--_2us);
}LCD1602驱动调用测试
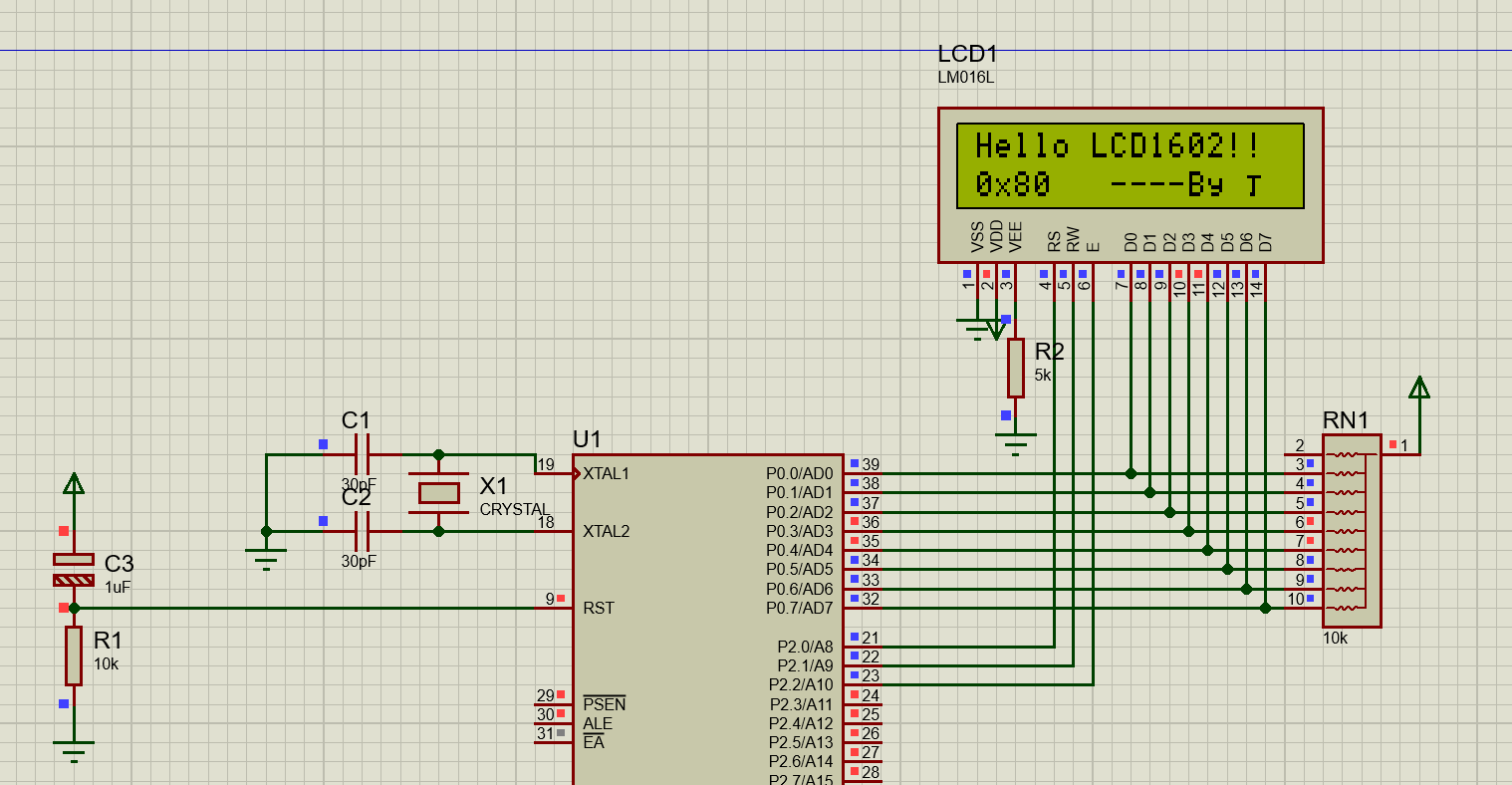
#include "REG51.H"
#include "utils.h"
#include "lcd1602.h"
code uint8_t ding[] = {0x00, 0x3F, 0x04, 0x04, 0x04, 0x04, 0x0C, 0x00};
void main()
{
uint8_t i;
LCD_Init();
LCD_LoadCustomChar(1, ding);
LCD_Clear();
LCD_Cusor_Init();
LCD_PutString(" Hello LCD1602!! ");
LCD_Cusor_GoToXY(0, 1);
LCD_PutChar(' ');
LCD_PutHexWith0x(0x80);
LCD_PutString(" ----By ");
LCD_ShowCustomChar(1);
LCD_Scroll_View_Step('L');
while (1) {
i = 1;
while (i--) {
LCD_Scroll_View_Step('R');
delay_ms(500);
}
i = 1;
while (i--) {
LCD_Scroll_View_Step('L');
delay_ms(500);
}
}
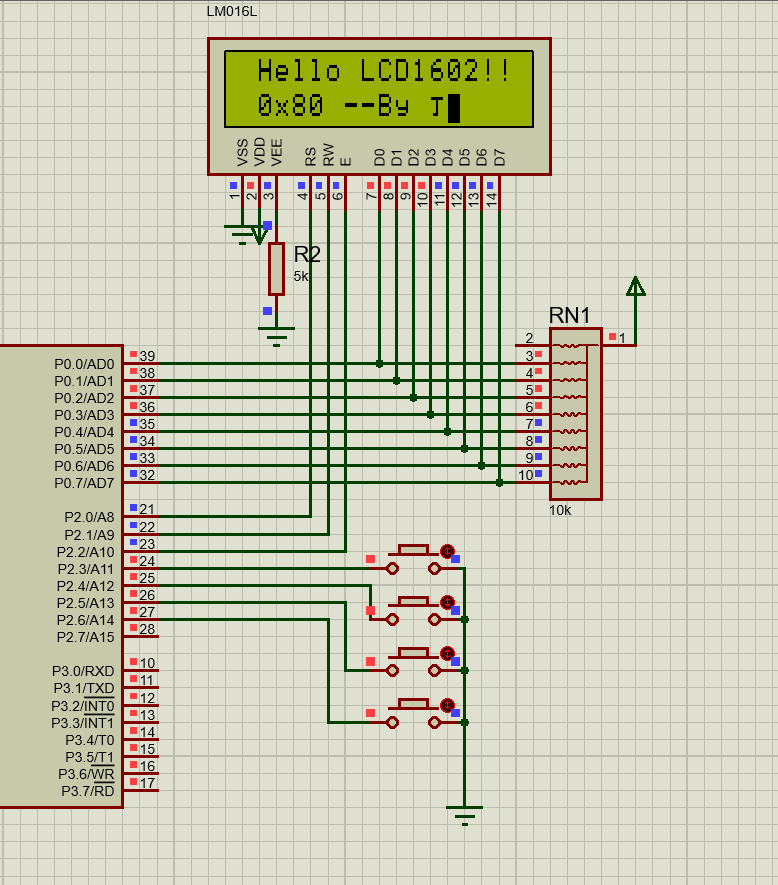
}轻触开关下降沿触发
写法
sbit k1 = P2 ^ 3;
sbit k2 = P2 ^ 4;
sbit k3 = P2 ^ 5;
sbit k4 = P2 ^ 6;
sbit k5 = P2 ^ 7;
uint8_t AllKeyUp = true;
uint8_t keyScanf()
{
k1 = k2 = k3 = k4 = true; // 向所有端口发送高电平
if (k1 && k2 && k3 && k4) { // 按键全部抬起
AllKeyUp = true;
return 0;
}
if (AllKeyUp /*保证下降沿触发*/ && (!k1 || !k2 || !k3 || !k4) /*任一按键按下(其实可以不用写,程序执行到这里必然满足该条件)*/) {
delay_ms(10); // 防抖动
if (!k1 || !k2 || !k3 || !k4) {
AllKeyUp = false; // 标记为有按键按下
if (!k1) return 1;
if (!k2) return 2;
if (!k3) return 3;
if (!k4) return 4;
}
}
return 0;
}#include "REG51.H"
#include "utils.h"
#include "lcd1602.h"
code uint8_t ding[] = {0x00, 0x3F, 0x04, 0x04, 0x04, 0x04, 0x0C, 0x00};
sbit k1 = P2 ^ 3;
sbit k2 = P2 ^ 4;
sbit k3 = P2 ^ 5;
sbit k4 = P2 ^ 6;
sbit k5 = P2 ^ 7;
uint8_t AllKeyUp = true;
uint8_t keyScanf()
{
k1 = k2 = k3 = k4 = true; // 向所有端口发送高电平
if (k1 && k2 && k3 && k4) { // 按键全部抬起
AllKeyUp = true;
return 0;
} else if (AllKeyUp /*保证下降沿触发*/ && (!k1 || !k2 || !k3 || !k4) /*任一按键按下*/) {
delay_ms(10); // 防抖动
if (!k1 || !k2 || !k3 || !k4) {
AllKeyUp = false; // 标记为有按键按下
if (!k1) return 1;
if (!k2) return 2;
if (!k3) return 3;
if (!k4) return 4;
}
}
return 0;
}
void LCD_BackSpace()
{
LCD_Scroll_Cusor_Step('L');
LCD_PutChar(' ');
LCD_Scroll_Cusor_Step('L');
}
void main()
{
uint8_t i;
LCD_Init();
LCD_LoadCustomChar(1, ding);
LCD_Clear();
LCD_Cusor_Init();
LCD_PutString(" Hello LCD1602!! ");
LCD_Cusor_GoToXY(0, 1);
LCD_PutChar(' ');
LCD_PutHexWith0x(0x80);
LCD_PutString(" --By ");
LCD_ShowCustomChar(1);
while (1) {
uint8_t res = keyScanf();
if (res == 1) LCD_Cusor_Flash(true);
if (res == 2) LCD_Cusor_Show_UnderLine(true);
if (res == 3) LCD_BackSpace();
if (res == 4) LCD_PutNumWithSign(i++);
}
}
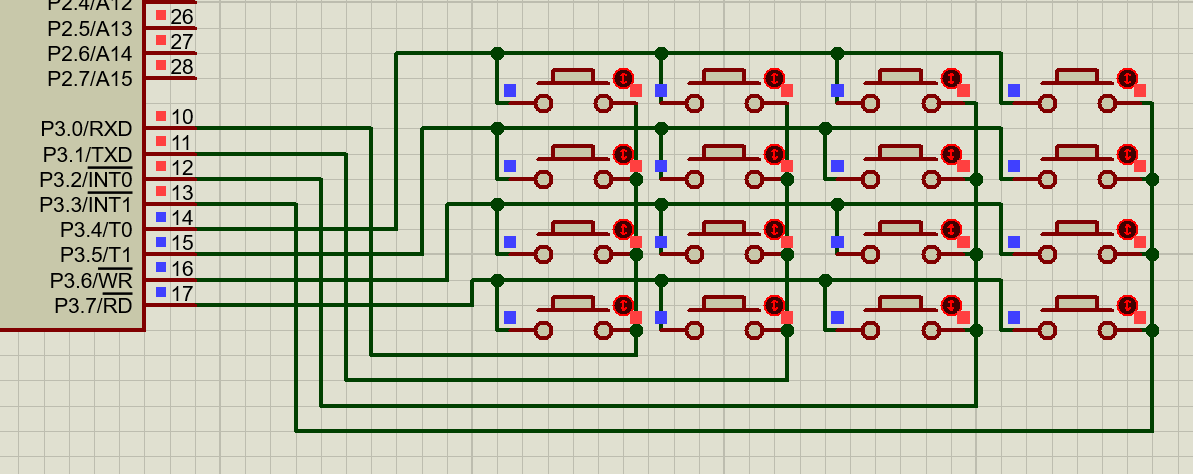
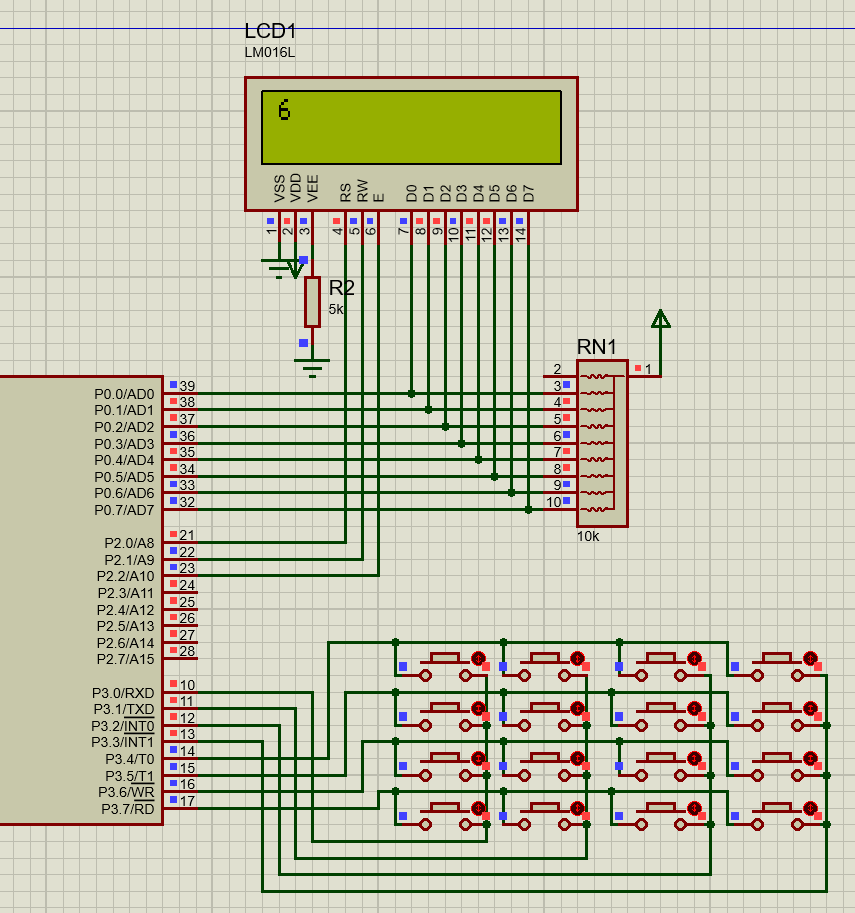
矩阵按键驱动编写
(支持多个按键同时按下)
MatrixBtns.h
#ifndef _MatrixBtns_H_
#define _MatrixBtns_H_
#include "REG51.H"
#include "utils.h"
// 端口定义 1~4bit连接列,5~8bit连接行
// 1 2 3 4
// 5 | x x x x |
// 6 | x x x x |
// 7 | x x x x |
// 8 | x x x x |
#define MB_DATA P3
uint8_t MatrixKeyCodeScanf(); // 获取按键代码
uint8_t MatrixCharScanf(); // 获取按下的字符
#endifMatrixBtns.c
#include "MatrixBtns.h"
uint8_t KeyRowScanf()
{
static uint8_t KeyRowUp = 1;
MB_DATA = 0xf0; // 发送行扫描
if (MB_DATA == 0xf0) { // 说明没有按键被按下
KeyRowUp = 1;
} else if (KeyRowUp) /*保证下降沿触发*/ {
delay_ms(5); // 执行到这里必然是有按键被按下,先去除抖动
if (~MB_DATA & 0xf0) { // 被按下的列为低电平,取反就能找到被按下的列
KeyRowUp = 0;
return ~MB_DATA & 0xf0;
// 如果第一行被按下则返回结果为 0001 0000
// 如果第二行被按下则返回结果为 0010 0000
// 如果第一行和第二行被同时按下 0011 0000
}
}
return 0;
}
uint8_t KeyColScanf()
{
static uint8_t KeyColUp = 1;
MB_DATA = 0x0f;
if (MB_DATA == 0x0f) {
KeyColUp = 1;
} else if (KeyColUp) {
delay_ms(5);
if (~MB_DATA & 0x0f) {
KeyColUp = 0;
return ~MB_DATA & 0x0f;
// 如果第一列被按下则返回结果为 0000 0001
// 如果第二列被按下则返回结果为 0000 0010
// 如果第一列和第二列被同时按下 0000 0011
}
}
return 0;
}
uint8_t MatrixKeyCodeScanf()
{
uint8_t row = KeyRowScanf();
uint8_t col = KeyColScanf();
// 行和列都不为0
if (row && col) return row | col;
else return 0x00;
}
uint8_t MatrixCharScanf()
{
uint8_t keyCode = MatrixKeyCodeScanf();
switch (keyCode) {
case 0x11 :return '1';
case 0x12 :return '2';
case 0x14 :return '3';
case 0x18 :return '4';
case 0x21 :return '5';
case 0x22 :return '6';
case 0x24 :return '7';
case 0x28 :return '8';
case 0x41 :return '9';
case 0x42 :return '0';
case 0x44 :return '+';
case 0x48 :return '-';
case 0x81 :return '*';
case 0x82 :return '/';
case 0x84 :return '=';
case 0x88 :return '\x08';// ascii 退格
default: return -1;
}
}使用测试
#include "REG51.H"
#include "utils.h"
#include "lcd1602.h"
#include "MatrixBtns.h"
void main()
{
LCD_Init();
while (1) {
uint8_t ch = MatrixCharScanf();
if(ch!=-1){
LCD_Cusor_GoToXY(0,0);
LCD_PutChar(ch);
}
}
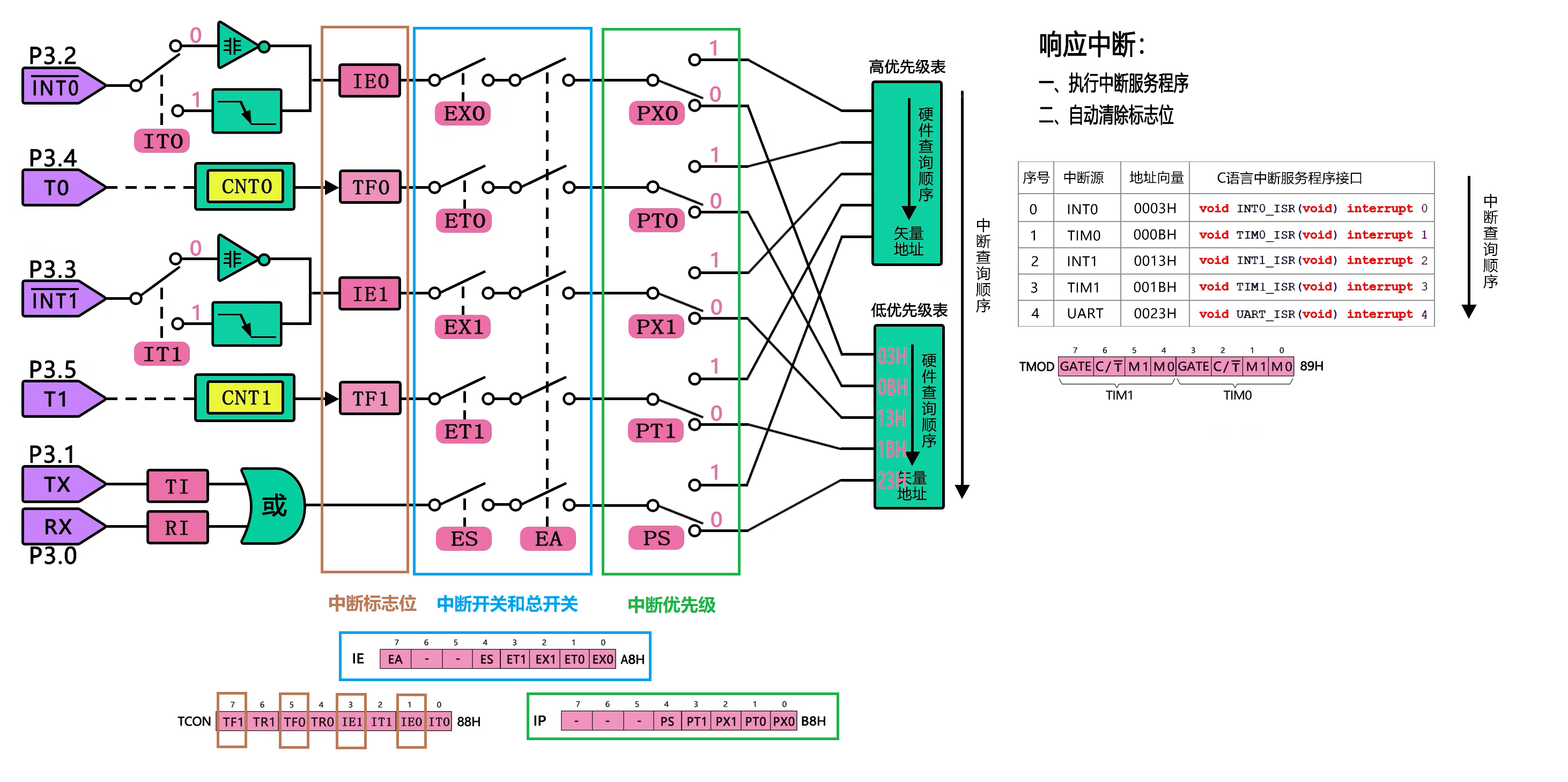
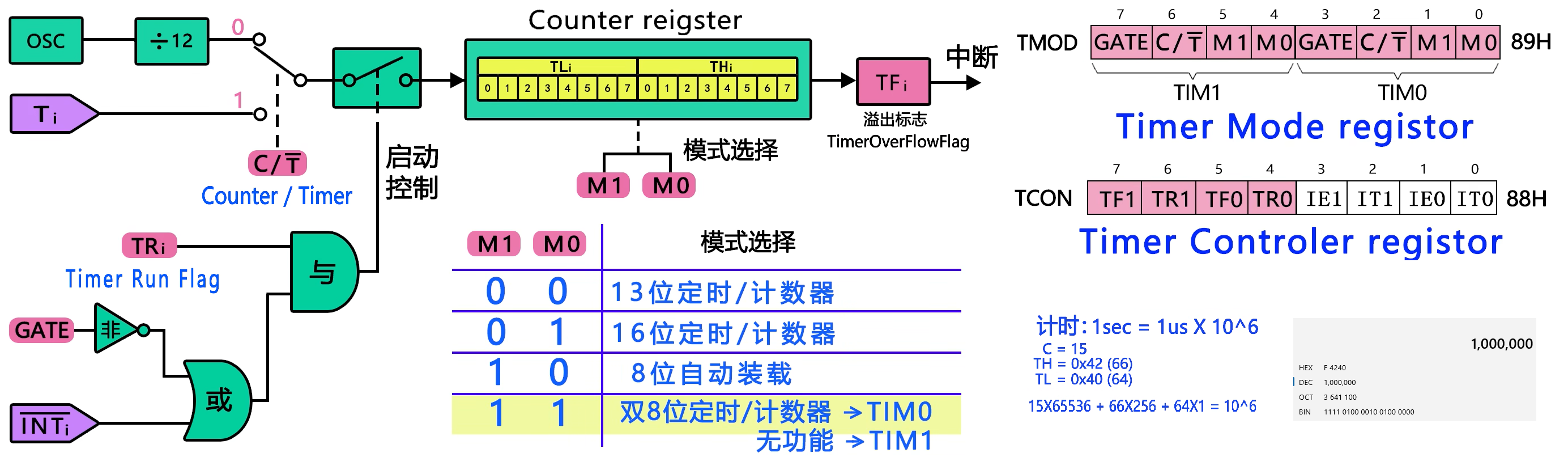
}定时器/计数器电路工作原理
中断系统工作原理