卡尔曼滤波器:递归算法
2025/1/5大约 2 分钟
卡尔曼滤波器学习笔记
卡尔曼滤波器(Kalman Filter)
- 不是一般意义上的滤波器
- 是一种最优化递归数字处理算法(optimal recursive data processing algorithm)
- 更像是一种观测器(observer)
卡尔曼滤波器广泛应用的原因:世界中存在大量不确定性
- 不存在完美的数学模型
- 系统的扰动不可控,难以建模
- 测量的传感器存在误差
递归算法
案例:
- 用尺子多次
测量硬币的直径 - 使用求平均数的方式
估计硬币真实直径
测量结果
| 第n次测量结果 |
|---|
求平均数公式推导递归算法:
结论
卡尔曼增益K
把上面案例中的系数
那么就得到了卡尔曼滤波算法中的第一个公式:
其中卡尔曼增益K
分析:
卡尔曼滤波计算三步骤
第一步:计算卡尔曼增益
第二步:计算估计值
第三步:更新估计误差
案例
import numpy as np
import matplotlib.pyplot as plt
# 数据
N = 50
Z = []
X = [0] # 估计值初值0
Error_mes = 5 # 测量误差
Error_est = 50 # 估计误差 初值50mm
K = 0 # 卡尔曼增益
# 生成随机数据: 均值 50mm 测量误差 5mm
for i in range(0,N):
Z.append(np.random.normal(50,5))
for i in range(1,N):
K = Error_est/(Error_est+Error_mes) # 卡尔曼增益=估计误差/(估计误差+测量误差)
x = X[i-1] + K * (Z[i] - X[i-1]) # 估计值=测量值-K*(测量值-真实值)
Error_est = (1-K) * Error_est # 估计误差=(1-K)*估计误差
X.append(x)
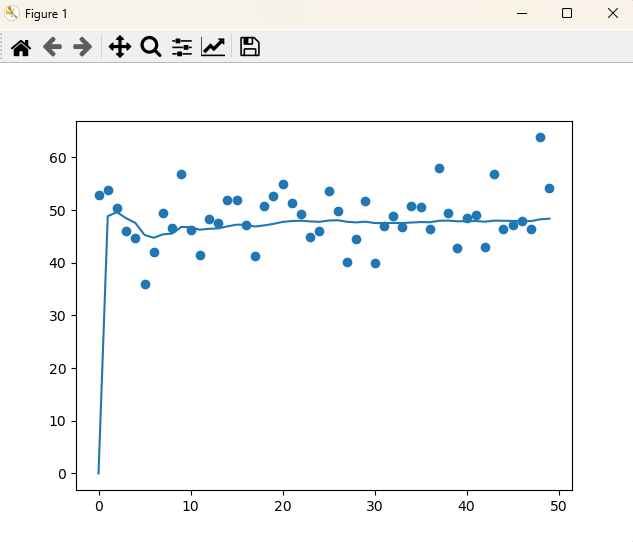
# 绘制图形
plt.scatter(range(0,len(Z)),Z) # 点图 测量值
plt.plot(range(0,len(X)),X) # 折线图 估计值
# 显示图形
plt.show()