FOC算法学习与实现笔记-04.高频方波注入提取位置公式推导
2024/8/4大约 4 分钟
高频方波注入提取位置公式推导
- 作用
- 可以在电机d轴(或估计的d轴)注入高频方波,
- 然后通过提取电流响应信号,
- 来估算电机转子的角度。
- 方法
- 把pwm信号的两个周期作为高频方波信号的周期
- 往电机的D轴注入电压信号
- 在方波的上半个周期注入正电压,
- 在方波的下半个周期注入负电压。
dq轴电压、电流方程
简化模型
- 当注入高频电压时,感抗电压远远大于电阻和磁链的压降,
- 所以电阻和磁链上的电压响应可以忽略不计
写成矩阵形式
写成电流方程
旋转到α-β轴(帕克逆变换)
用估计d-q坐标轴电压,表示真实d-q坐标轴电压
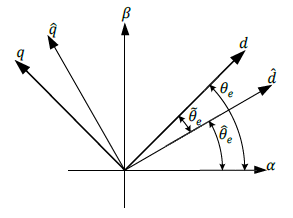
通过帕克变换,就能使用角度误差 估计的d-q轴 来表示 真实的d-q轴。
代入之前推导出的关系式,
就能得到 估计d-q轴高频电压激励 和 真实α-β轴的高频电流响应 的关系式 。
化简:计算逆矩阵
- 旋转矩阵的逆就是其转置矩阵
- 对角矩阵的逆就是把对角元素取倒数
化简:计算矩阵乘法
化简:假设估计的dq轴位置就是实际dq轴的位置
- 由于估计的dq轴和实际dq轴的误差角度在迭代多次后逐渐逼近0,
- 这将导致旋转矩阵变成单位矩阵
- 也就是假设估计的dq轴位置就是实际dq轴的位置。
化简:注入q轴的电压为0
- 由于我们通常只在
估计的d-q轴的d轴注入高频电压, - 所以注入q轴的电压为0,
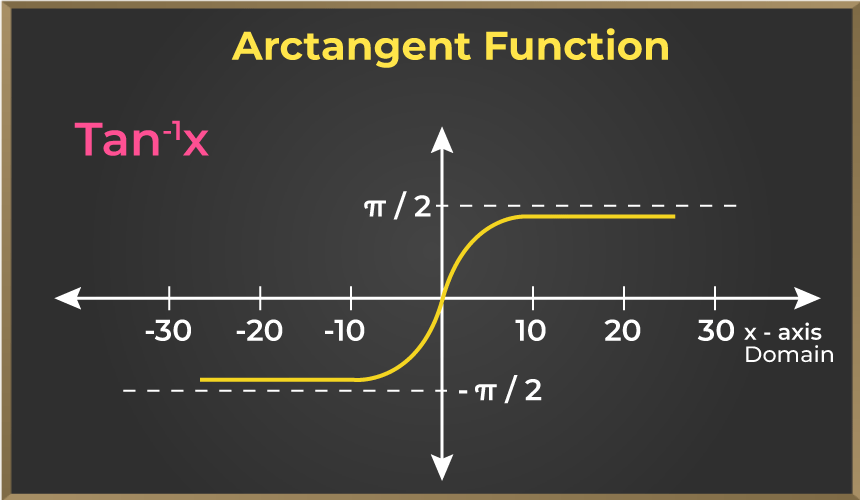
求出角度
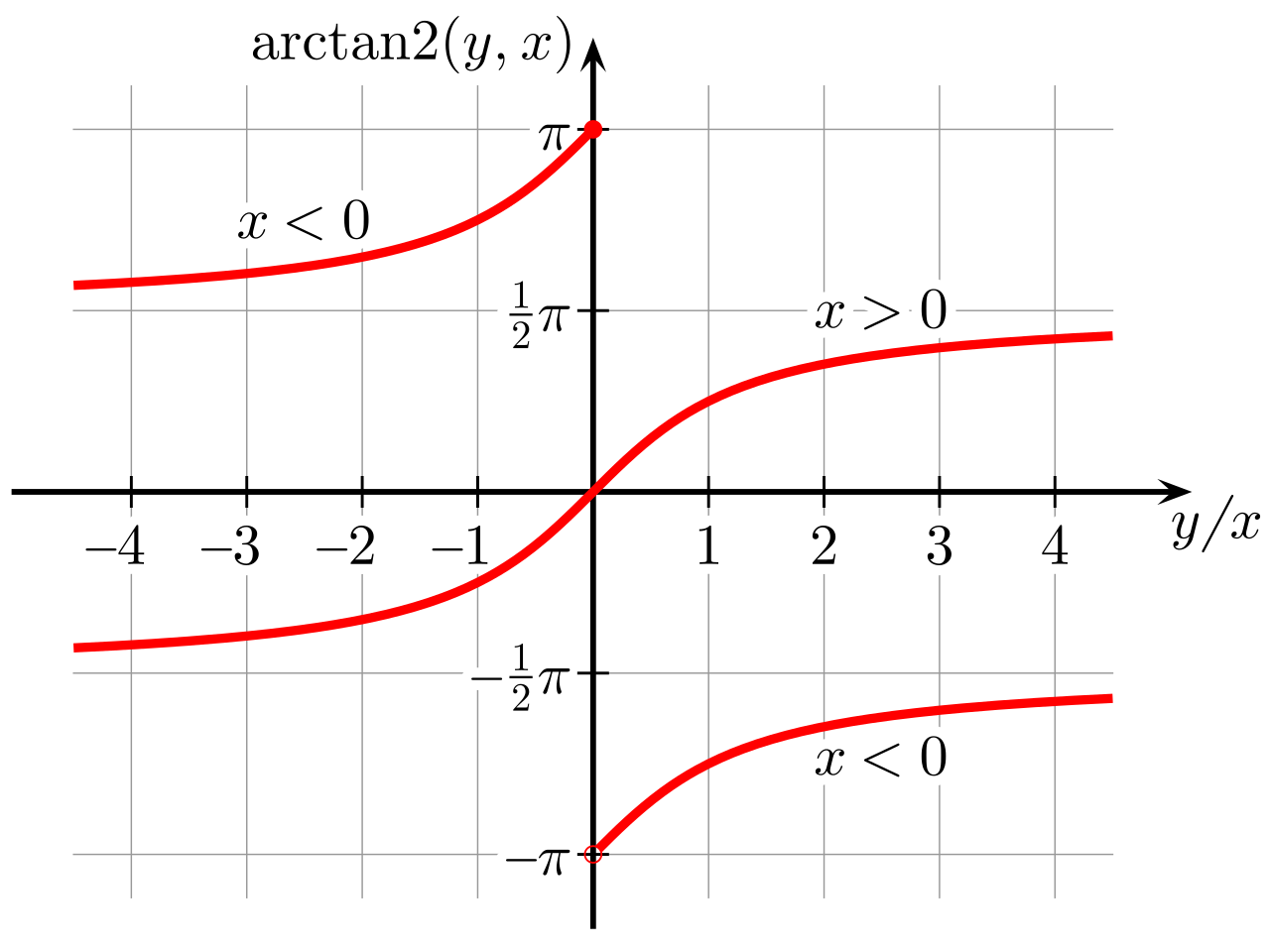
改为使用atan2(a,b)计算角度
- 因为
- 所以这里需要使用
参考
无感FOC之高频注入法——永磁同步电机控制 https://aijishu.com/a/1060000000315769