01.使用定点数查表法计算三角函数
2024/9/16大约 1 分钟
01.使用定点数查表法计算三角函数
返回值- 类型:
int16_t - 映射关系:
[-32768,32767]表示[-1,1] - 精度:1/32768 = 0.0000305
- 类型:
角度- 类型:
uint16_t - 映射关系:
[0,65535]表示[0,2PI] - 精度:360°/65535 = 0.00549°
- 类型:
具体实现
foc_utils.c#include "foc_utils.h"
/**
* 使用定点数计算sin
* @param a uint16_t [0,65535] 表示 [0,2PI] 精度:360°/65535 = 0.00549°
* @return int16_t [-32768,32767] 表示 [-1,1] 精度:1/32768 = 0.0000305
*/
__attribute__((weak)) int16_t _sin(uint16_t a)
{
// sine_array [0,1] => [0,32767] 这里要用32767表示1,因为int16_t可以表示-32768,但是无法表示+32768
static uint16_t sine_array[65] = {0, 804, 1608, 2410, 3212, 4011, 4808, 5602, 6393, 7179, 7962, 8739, 9512, 10278, 11039, 11793, 12539, 13279, 14010, 14732, 15446, 16151, 16846, 17530, 18204, 18868, 19519, 20159, 20787, 21403, 22005, 22594, 23170, 23731, 24279, 24811, 25329, 25832, 26319, 26790, 27245, 27683, 28105, 28510, 28898, 29268, 29621, 29956, 30273, 30571, 30852, 31113, 31356, 31580, 31785, 31971, 32137, 32285, 32412, 32521, 32609, 32678, 32728, 32757, 32767};
int32_t t1, t2;
uint16_t i = (uint32_t)a * 64 * 4 * 256 / _2PI_;
uint16_t frac = i & 0xff;
i = (i >> 8) & 0xff;
if (i < 64)
{
t1 = sine_array[i];
t2 = sine_array[i + 1];
}
else if (i < 128)
{
t1 = sine_array[128 - i];
t2 = sine_array[128 - (i + 1)];
}
else if (i < 192)
{
// 因为-((uint16_t)0)会计算错误 所以要写成-((int32_t)(uint16_t)0)
t1 = -(int32_t)sine_array[-128 + i];
t2 = -(int32_t)sine_array[-128 + (i + 1)];
}
else
{
t1 = -(int32_t)sine_array[256 - i];
t2 = -(int32_t)sine_array[256 - (i + 1)];
}
return (t1 + (((t2 - t1) * frac / 256)));
}
__attribute__((weak)) int16_t _cos(uint16_t a)
{
// _cos和sin相位差90°,所以加上PI/2
// 防止溢出所以使用uint32_t
uint32_t a_sin = a + _PI_2_;
a_sin = a_sin > _2PI_ ? a_sin - _2PI_ : a_sin;
return _sin(a_sin);
}
__attribute__((weak)) void _sincos(uint16_t a, int16_t *s, int16_t *c)
{
*s = _sin(a);
*c = _cos(a);
}foc_utils.h#ifndef __FOC_UTILS_H__
#define __FOC_UTILS_H__
#include <stdint.h>
#include "typedef.h"
#ifdef __cplusplus
extern "C"
{
#endif
/**
* 定点数计算sin
* @param a uint16_t [0,65535] 表示 [0,2PI] 精度:360°/65535 = 0.00549°
* @return int16_t [-32768,32767] 表示 [-1,1] 精度:1/32768 = 0.0000305
*/
int16_t _sin(uint16_t a);
int16_t _cos(uint16_t a);
void _sincos(uint16_t a, int16_t *s, int16_t *c);
#ifdef __cplusplus
}
#endif
#endiftypedef.h// 单位1 32767
#define _INT16_ONE_ 32767
// 单位PI 180°
#define _PI_ 32767
// 360°
#define _2PI_ 65535
// 90°
#define _PI_2_ 16383
// 180°
#define _PI_4_ 16383
// -90°=270°
#define _3_PI_2_ 16383实现效果
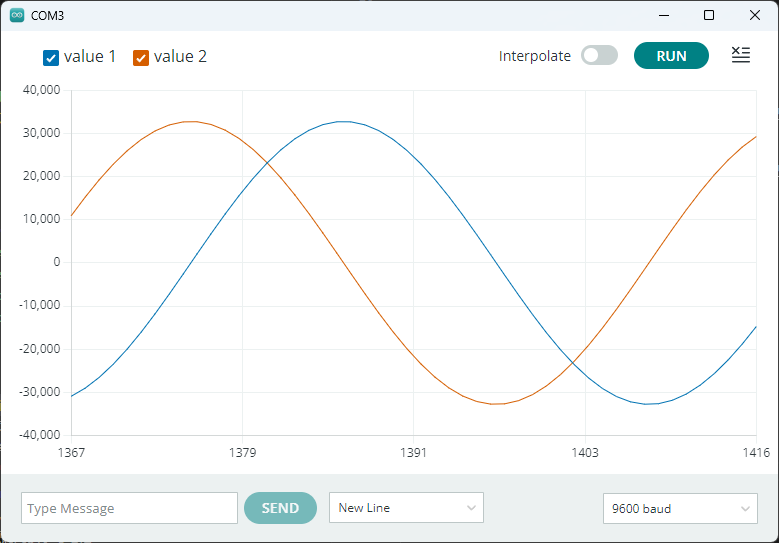
01.sin_and_cos.ino
#include <Arduino.h>
#include "foc_utils.h"
#include "typedef.h"
void setup() {
Serial.begin(9600);
}
uint16_t a = 0;
void loop() {
a += 1500;
if (a > _2PI_) a -= _2PI_;
Serial.print(_sin(a));
Serial.print(',');
Serial.print(_cos(a));
Serial.print('\n');
}浮点数运算与定点数运算的耗时对比
#include <Arduino.h>
#include <stdint.h>
void setup() {
Serial.begin(9600);
}
#define Times 10000
void testUint32() {
uint32_t t1 = micros(), t2;
uint32_t temp = 1;
for (uint32_t i = 1; i <= Times; i++) {
temp += 1234567; // 防止编译器优化
temp *= 1234567; // 防止编译器优化
}
t2 = micros();
Serial.print("uint32_t:");
Serial.print(temp);// 防止编译器优化
Serial.print(',');
Serial.print((float)(t2 - t1) / Times);
Serial.print("us");
Serial.println();
}
void testFloat32() {
uint32_t t1 = micros(), t2;
float temp = 1;
for (uint32_t i = 1; i <= Times; i++) {
temp += 0.001234f; // 防止编译器优化
temp *= 1.001234f; // 防止编译器优化
}
t2 = micros();
Serial.print("float:");
Serial.print(temp); // 防止编译器优化
Serial.print(',');
Serial.print((float)(t2 - t1) / Times);
Serial.print("us");
Serial.println();
}
void loop() {
testUint32();
testFloat32();
}输出结果
11:18:20.188 -> uint32_t:2763457473,5.80us
11:18:20.397 -> float:454365.65,18.69us
11:18:20.434 -> uint32_t:2763457473,5.80us
11:18:20.630 -> float:454365.65,18.69us
11:18:20.708 -> uint32_t:2763457473,5.80us
11:18:20.877 -> float:454365.65,18.69us
11:18:20.950 -> uint32_t:2763457473,5.80us
11:18:21.119 -> float:454365.65,18.69us
11:18:21.196 -> uint32_t:2763457473,5.80us
11:18:21.372 -> float:454365.65,18.69us
11:18:21.449 -> uint32_t:2763457473,5.80us
11:18:21.614 -> float:454365.65,18.69us
11:18:21.691 -> uint32_t:2763457473,5.80us
11:18:21.864 -> float:454365.65,18.69us
11:18:21.937 -> uint32_t:2763457473,5.80us
11:18:22.126 -> float:454365.65,18.69us
11:18:22.162 -> uint32_t:2763457473,5.80us
11:18:22.375 -> float:454365.65,18.69us结论
- 在8位、16Mhz主频、无FPU浮点数计算单元的单片机上
- Arduino UNO R3 (ATmega328P)
- 浮点数运算耗时大约是定点数耗时的3倍。