06.实现LowPassFilter对传感器数据滤波
2024/9/20小于 1 分钟
06.实现LowPassFilter对传感器数据滤波
具体实现
LowPassFilter.hpp#ifndef _LowPassFilter_H_
#define _LowPassFilter_H_
#include "Timer.hpp"
class LowPassFilter : Timer
{
private:
uint16_t Tms;
int32_t pre_value;
public:
LowPassFilter(uint16_t Tms)
{
this->Tms = Tms;
}
int32_t operator()(int32_t value)
{
uint16_t dt_ms = this->dt_ms();
uint8_t k = UINT8_MAX * (uint32_t)dt_ms / (Tms + dt_ms);
int32_t out = (k * value + (UINT8_MAX - k) * pre_value) / UINT8_MAX;
return pre_value = out;
}
};
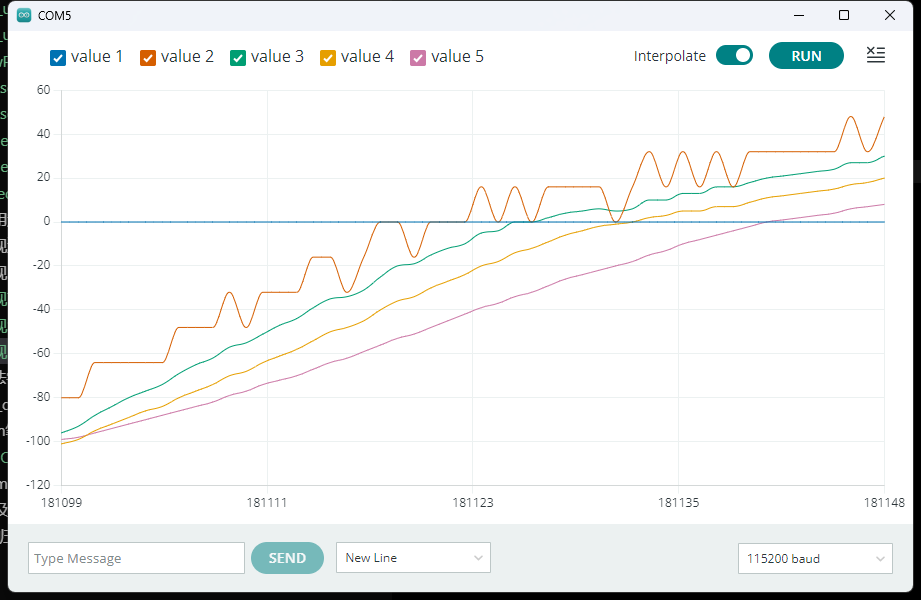
#endif实现效果
06.filter.ino
#include <Arduino.h>
#include <Wire.h>
#include "BLDCMotor.hpp"
#include "BLDCDriver.hpp"
#include "Sensor.hpp"
#include "foc_utils.h"
#include "typedef.h"
#define AS5600
// #define AS5047P
#ifdef AS5600
#define AS5600_ADDR 0x36
#define AS5600_RAW_ANGLE 0x0c
#define AS5600_ANGLE 0x0e
#elif defined AS5047P
#include <AS5047P.h>
#define AS5047P_CHIP_SELECT_PORT 9
#define AS5047P_CUSTOM_SPI_BUS_SPEED 100000
AS5047P as5047p = AS5047P(AS5047P_CHIP_SELECT_PORT, AS5047P_CUSTOM_SPI_BUS_SPEED);
#endif
Sensor *sensor = new Sensor(
#ifdef AS5600
[]()
{
Wire.begin();
},
[]()
{
Wire.beginTransmission(AS5600_ADDR);
Wire.write(AS5600_ANGLE);
Wire.endTransmission(false);
Wire.requestFrom(AS5600_ADDR, 2);
uint16_t data = 0;
*((uint8_t *)&data + 1) = Wire.read();
*((uint8_t *)&data + 0) = Wire.read();
Wire.endTransmission(true);
// as5600 12bit精度,左移4位变成16位
data <<= 4;
return data;
}
#elif defined AS5047P
[]()
{
pinMode(AS5047P_CHIP_SELECT_PORT, OUTPUT);
as5047p.initSPI();
},
[]()
{
digitalWrite(AS5047P_CHIP_SELECT_PORT, HIGH);
// 14bit精度 左移2位变成16位
uint16_t data = as5047p.readAngleRaw() << 2;
digitalWrite(AS5047P_CHIP_SELECT_PORT, LOW);
return data;
}
#endif
);
#include "LowPassFilter.hpp"
LowPassFilter filter1 = LowPassFilter(5);
LowPassFilter filter2 = LowPassFilter(10);
LowPassFilter filter3 = LowPassFilter(20);
void setup()
{
Serial.begin(115200);
sensor->initSensor();
}
void loop()
{
sensor->update();
Serial.print(0);
Serial.print(',');
Serial.print(sensor->getVelocity());
Serial.print(',');
Serial.print(filter1(sensor->getVelocity()));
Serial.print(',');
Serial.print(filter2(sensor->getVelocity()));
Serial.print(',');
Serial.print(filter3(sensor->getVelocity()));
Serial.print('\n');
}