FOC算法实现过程记录:13.锁相环实现
2024/12/2小于 1 分钟
13.使用锁相环实现对转子位置和速度的计算
具体实现
PLL.h#ifndef _PLL_H_
#define _PLL_H_
#include "LowPassFilter.hpp"
#include "PIDControler.hpp"
#include "Timer.hpp"
#include "config.h"
#include "foc_utils.h"
class PLL
{
private:
Timer *timer = new ConcreteTimer();
public:
PIDControler pid_speed_controller{500, 250, 0, 1e10, 0};
LowPassFilter lpf{5};
float speed = 0;
float value = 0;
float update(float target)
{
// PLL=鉴相=>低通滤波=>压控振荡器
speed = pid_speed_controller(lpf(_sin(_normalizeAngle(target - value))));
value += speed * timer->dt_s();
return value;
}
};
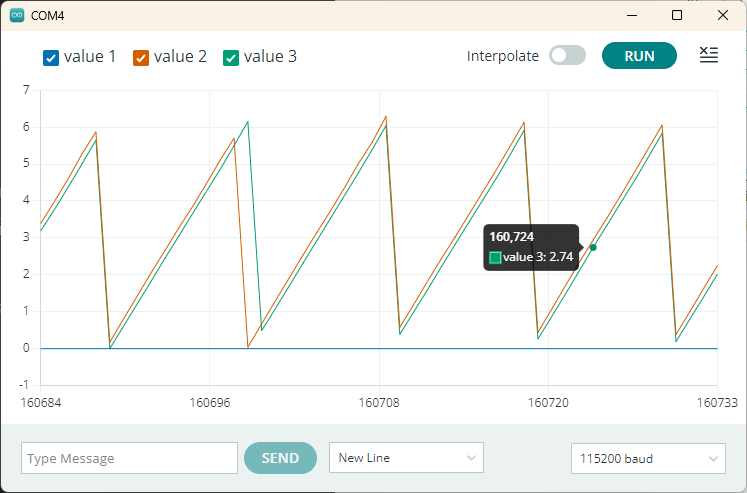
#endif实现效果
代码
#include <Arduino.h>
#include <Wire.h>
#include "BLDCMotor.hpp"
#include "BLDCDriver.hpp"
#include "Sensor.hpp"
#include "foc_utils.h"
#include "communication.hpp"
#include "arduino/ArduinoBLDCDriver.hpp"
#include "arduino/ArduinoCurrentSensor.hpp"
#include "arduino/AS5600Sensor.hpp"
#include "Pll.h"
BLDCMotor motor = BLDCMotor(7, 12);
AS5600Sensor *sensor = new AS5600Sensor();
BLDCDriver *driver = new ArduinoBLDCDriver(5, 9, 6, 8);
CurrentSensor *currentSensor = new ArduinoCurrentSensor(A0, A2, 0.01f, 50);
void setup()
{
Serial.begin(115200);
motor.connectDriver(driver);
motor.connectSensor(sensor);
motor.connectCurrentSensor(currentSensor);
motor.initFOC();
motor.setMode(BLDCControlMode::Current);
}
void decode_message();
Timer *tim = new ConcreteTimer();
void loop()
{
motor.loopFOC();
decode_message();
send_message();
static uint8_t cnt = 0;
if (++cnt % 15 == 0 && buffer_empty())
{
cnt = 0;
buf_len += sprintf(buffer, "0,%.2f,%.2f\n", sensor->position_now, _normalizeAngle(sensor->pll.value));
}
}
void decode_message()
{
if (Serial.available())
{
uint8_t cmd = Serial.read();
float val = Serial.parseFloat();
while (Serial.read() != '\n')
;
switch (cmd)
{
case 'm':
motor.setMode((BLDCControlMode)val);
break;
case 't':
motor.setTarget(val);
break;
case 'l':
sensor->pll.lpf.Tms=val;
break;
case 'p':
sensor->pll.pid_speed_controller.Kp=val;
sensor->pll.pid_speed_controller.reset();
break;
case 'i':
sensor->pll.pid_speed_controller.Ki=val;
sensor->pll.pid_speed_controller.reset();
break;
case 'd':
sensor->pll.pid_speed_controller.Kd=val;
sensor->pll.pid_speed_controller.reset();
break;
// case 'l':
// motor.current_d_filter.Tms = val;
// motor.current_q_filter.Tms = val;
// break;
// case 'p':
// motor.pid_id_controller.Kp = val;
// motor.pid_iq_controller.Kp = val;
// motor.pid_id_controller.reset();
// motor.pid_iq_controller.reset();
// break;
// case 'i':
// motor.pid_id_controller.Ki = val;
// motor.pid_iq_controller.Ki = val;
// motor.pid_id_controller.reset();
// motor.pid_iq_controller.reset();
// break;
// case 'd':
// motor.pid_id_controller.Kd = val;
// motor.pid_iq_controller.Kd = val;
// motor.pid_id_controller.reset();
// motor.pid_iq_controller.reset();
// break;
default:
break;
}
}
}