10.实现close_loop_velocity_control闭环速度控制
2024/9/25小于 1 分钟
10.实现close_loop_velocity_control闭环速度控制
具体实现
BLDCMotor.cpp#include "Arduino.h"
#include "BLDCMotor.hpp"
BLDCMotor::BLDCMotor(uint8_t polePairs, float power_supply_voltage)
{
this->polePairs = polePairs;
this->power_supply_voltage = power_supply_voltage;
}
void BLDCMotor::connectDriver(BLDCDriver *driver)
{
this->driver = driver;
}
void BLDCMotor::connectSensor(Sensor *sensor)
{
this->sensor = sensor;
}
void BLDCMotor::connectCurrentSensor(CurrentSensor *currentSensor)
{
this->currentSensor = currentSensor;
}
void BLDCMotor::connectCommand(Command *command)
{
this->command = command;
}
void BLDCMotor::initFOC()
{
if (this->currentSensor)
{
this->currentSensor->initSensor();
this->currentSensor->alignSensor();
}
if (this->driver)
{
this->driver->initDriver();
this->driver->enableDriver(true);
this->driver->setPhraseVoltage(0, 0, 0);
}
if (this->sensor)
{
this->sensor->initSensor();
this->sensor->connectMotor(this);
this->sensor->alignSensor();
this->sensor->init();
this->sensor->update();
}
}
void BLDCMotor::loopFOC()
{
if (this->sensor)
this->sensor->update();
switch (controlMode)
{
case ControlMode::Voltage:
this->open_loop_voltage_control(0, target);
break;
case ControlMode::Current:
this->close_loop_current_control(target);
break;
case ControlMode::Velocity:
this->close_loop_velocity_control(target);
break;
case ControlMode::Position:
this->close_loop_velocity_control(target);
break;
default:
break;
}
}
/**
* 设置控制模式
*/
void BLDCMotor::setMode(ControlMode controlMode)
{
switch (controlMode)
{
case ControlMode::Unknow:
break;
case ControlMode::Voltage:
break;
case ControlMode::Current:
// 官方 Simple FOC Shield v2.0.4 开发板 with 2808云台电机
// this->pid_id_controller = PIDControler(2.8, 200, -0.005, this->limit_voltage, 0);
// this->pid_iq_controller = PIDControler(2.8, 200, -0.005, this->limit_voltage, 0);
// 艾尔塞电子 Simple FOC Shield v2.0.4 开发板 with 2808云台电机
// this->pid_id_controller = PIDControler(2, 1000, 0, this->limit_voltage, 0);
// this->pid_iq_controller = PIDControler(2, 1000, 0, this->limit_voltage, 0);
// 官方 Simple FOC Shield v2.0.4 开发板 with 2804-100kv 云台电机
this->pid_id_controller = PIDControler(20, 500, 0, this->limit_voltage, 400);
this->pid_iq_controller = PIDControler(20, 500, 0, this->limit_voltage, 400); // 完美
break;
case ControlMode::Velocity:
// 官方 Simple FOC Shield v2.0.4 开发板 with 2808云台电机
// this->pid_id_controller = PIDControler(2.8, 0.01, 0, this->limit_voltage, 0);
// this->pid_iq_controller = PIDControler(2.8, 0.01, 0, this->limit_voltage, 0);
// this->pid_velocity_controller = PIDControler(0.5, 2.5, 0, this->limit_current, 0); // kp<1; ki<=10;
// 艾尔塞电子 Simple FOC Shield v2.0.4 开发板 with 2808云台电机
// this->pid_id_controller = PIDControler(2, 1000, 0, this->limit_voltage, 0);
// this->pid_iq_controller = PIDControler(2, 1000, 0, this->limit_voltage, 0);
// this->pid_velocity_controller = PIDControler(0, 0, 0, this->limit_current, 0);
// 官方 Simple FOC Shield v2.0.4 开发板 with 2804-100kv 云台电机
this->pid_id_controller = PIDControler(20, 500, 0, this->limit_voltage, 400); // kp可以设置到30 但取其 2/3 为 20,余量留给ki发挥 roc设置为400是为了
this->pid_iq_controller = PIDControler(20, 500, 0, this->limit_voltage, 400);
this->pid_velocity_controller = PIDControler(0.01, 0.05, 0.0001, this->limit_current, 20); // 非常完美 但当电压为12v时最好设置电流限制为1
break;
case ControlMode::Position:
// this->pid_id_controller = PIDControler(2.8, 0.01, 0, this->limit_voltage, 0);
// this->pid_iq_controller = PIDControler(2.8, 0.01, 0, this->limit_voltage, 0);
// this->pid_velocity_controller = PIDControler(0.5, 2.5, 0, this->limit_current, 0);
// this->pid_position_controller = PIDControler(0, 0, 0, this->limit_velocity, 0);
break;
default:
break;
}
this->controlMode = controlMode;
}
void BLDCMotor::setTarget(float target)
{
this->target = target;
}
/**
* @details
* 电角度=机械角度*极对数
* @return [0,2PI] => [0,UINT16_MAX]
*/
uint16_t BLDCMotor::electricalAngle()
{
return this->sensor->getPositon() * polePairs;
}
/**
* 设置相电压
* @param u_d int16_t [-32768,32767] 表示 [-1,1] 精度:1/32768 = 0.0000605
* @param u_q int16_t [-32768,32767] 表示 [-1,1]
* @param e_angle uint16_t [0,65535] 表示 [0,2PI] 精度:360°/65535 = 0.00549°
*/
void BLDCMotor::setPhraseVoltage(int16_t u_d, int16_t u_q, uint16_t e_angle)
{
int16_t sin, cos;
// 计算三角函数
_sincos(e_angle, &sin, &cos);
// 帕克逆变换
int16_t u_alpha = ((cos * (int32_t)u_d) + (sin * -(int32_t)u_q)) / INT16_MAX;
int16_t u_beta = ((sin * (int32_t)u_d) + (cos * (int32_t)u_q)) / INT16_MAX;
// 克拉克逆变换(等幅值形式)
int16_t u_a = u_alpha;
int16_t u_b = (-1 * u_alpha + _INT16_SQRT3_ * u_beta / INT16_MAX) / 2;
int16_t u_c = -(u_a + u_b);
// 设置相电压
driver->setPhraseVoltage(u_a, u_b, u_c);
}
void BLDCMotor::open_loop_voltage_control(float target_ud, float target_uq)
{
uint16_t e_angle = this->electricalAngle();
float voltage_ud = _constrain(-limit_voltage, target_ud, limit_voltage);
float voltage_uq = _constrain(-limit_voltage, target_uq, limit_voltage);
int16_t u_d = this->sensor->directron * this->direction * (voltage_ud / power_supply_voltage * INT16_MAX);
int16_t u_q = this->sensor->directron * this->direction * (voltage_uq / power_supply_voltage * INT16_MAX);
this->setPhraseVoltage(u_d, u_q, e_angle);
}
/**
* 获取Q轴电流
*/
CurrentDQ BLDCMotor::getCurrentDQ()
{
CurrentDQ i = this->currentSensor->getCurrentDQ(this->electricalAngle());
return {
.d = this->current_d_filter(i.d),
.q = this->current_q_filter(i.q),
};
}
#include "foc_utils.h"
/**
* 电流闭环控制
*/
void BLDCMotor::close_loop_current_control(float target)
{
float target_i_d = 0;
float target_i_q = _constrain(-limit_current, target, limit_current);
CurrentDQ current = this->getCurrentDQ();
float error_d = target_i_d - current.d;
float error_q = target_i_q - current.q;
float u_d = this->pid_id_controller(error_d);
float u_q = this->pid_iq_controller(error_q);
this->open_loop_voltage_control(u_d, u_q);
static uint8_t idx = 0;
if (this->command && ++idx % 61 == 0)
{
idx = 0;
this->command->drawDragram(1, target_i_q, current.q);
}
}
/**
* 获取机械角速度
*/
float BLDCMotor::shaftVelocity()
{
return shaft_velocity_filter(this->sensor->getVelocity());
}
void BLDCMotor::close_loop_velocity_control(float target)
{
float target_velocity = _constrain(-limit_velocity, target, limit_velocity);
float current_velocity = this->shaftVelocity();
float error = target_velocity - current_velocity;
float i_q = this->direction * this->sensor->directron * this->pid_velocity_controller(error);
this->close_loop_current_control(i_q);
static uint8_t idx = 0;
if (this->command && ++idx % 62 == 0)
{
idx = 0;
this->command->drawDragram(2, target_velocity, current_velocity);
}
}BLDCMotor.hpp#ifndef __BLDCMotor_H__
#define __BLDCMotor_H__
#include <stdint.h>
#include "foc_utils.h"
#include "BLDCDriver.hpp"
#include "LowPassFilter.hpp"
#include "CurrentSensor.hpp"
#include "Sensor.hpp"
#include "Timer.hpp"
#include "pid.hpp"
#include "Command.hpp"
class BLDCMotor : Timer
{
public:
enum ControlMode : uint8_t
{
Unknow = 0,
Voltage = 1,
Current = 2,
Velocity = 3,
Position = 4
};
enum MotorDirectrion : int8_t
{
UNKNOW = 0,
ANTI_CLOCK_WISE = 1,
CLOCK_WISE = -1,
};
// 极对数
uint8_t polePairs;
// 供电电压
float power_supply_voltage = 12.0f;
// 限制电压
float limit_voltage = 12.0f;
// 限制电流
float limit_current = 10.0f;
// 限制速度
float limit_velocity = 130.0f;
// directron
MotorDirectrion direction = MotorDirectrion::ANTI_CLOCK_WISE;
// taget
float target = 0;
// mode
ControlMode controlMode = ControlMode::Velocity;
// filter
LowPassFilter current_q_filter{5};
LowPassFilter current_d_filter{5};
LowPassFilter shaft_velocity_filter{50};
LowPassFilter shaft_angle_filter{100};
// pid-controller
PIDControler pid_iq_controller;
PIDControler pid_id_controller;
PIDControler pid_velocity_controller;
PIDControler pid_position_controller;
private:
//
BLDCDriver *driver = nullptr;
Sensor *sensor = nullptr;
CurrentSensor *currentSensor = nullptr;
Command *command = nullptr;
public:
BLDCMotor(uint8_t polePairs, float power_supply_voltage);
void connectDriver(BLDCDriver *driver);
void connectSensor(Sensor *sensor);
void connectCurrentSensor(CurrentSensor *currentSensor);
void connectCommand(Command *command);
void initFOC();
void loopFOC();
/**
* 设置控制模式
*/
void setMode(ControlMode mode);
void setTarget(float target);
/**
* 获取电角度
*/
uint16_t electricalAngle();
/**
* 设置相电压
* @param u_d int16_t [-32768,32767] 表示 [-1,1] 精度:1/32768 = 0.0000305
* @param u_q int16_t [-32768,32767] 表示 [-1,1]
* @param e_angle uint16_t [0,65535] 表示 [0,2PI] 精度:360°/65535 = 0.00549°
*/
void setPhraseVoltage(int16_t u_d, int16_t u_q, uint16_t e_angle);
/**
* 开环电压控制
*/
void open_loop_voltage_control(float target_ud, float target_uq);
/**
* 获取dq轴电流
*/
CurrentDQ getCurrentDQ();
/**
* 闭环电流控制
*/
void close_loop_current_control(float target);
/**
* 获取机械角速度
*/
float shaftVelocity();
/**
* 闭环速度控制
*/
void close_loop_velocity_control(float target);
};
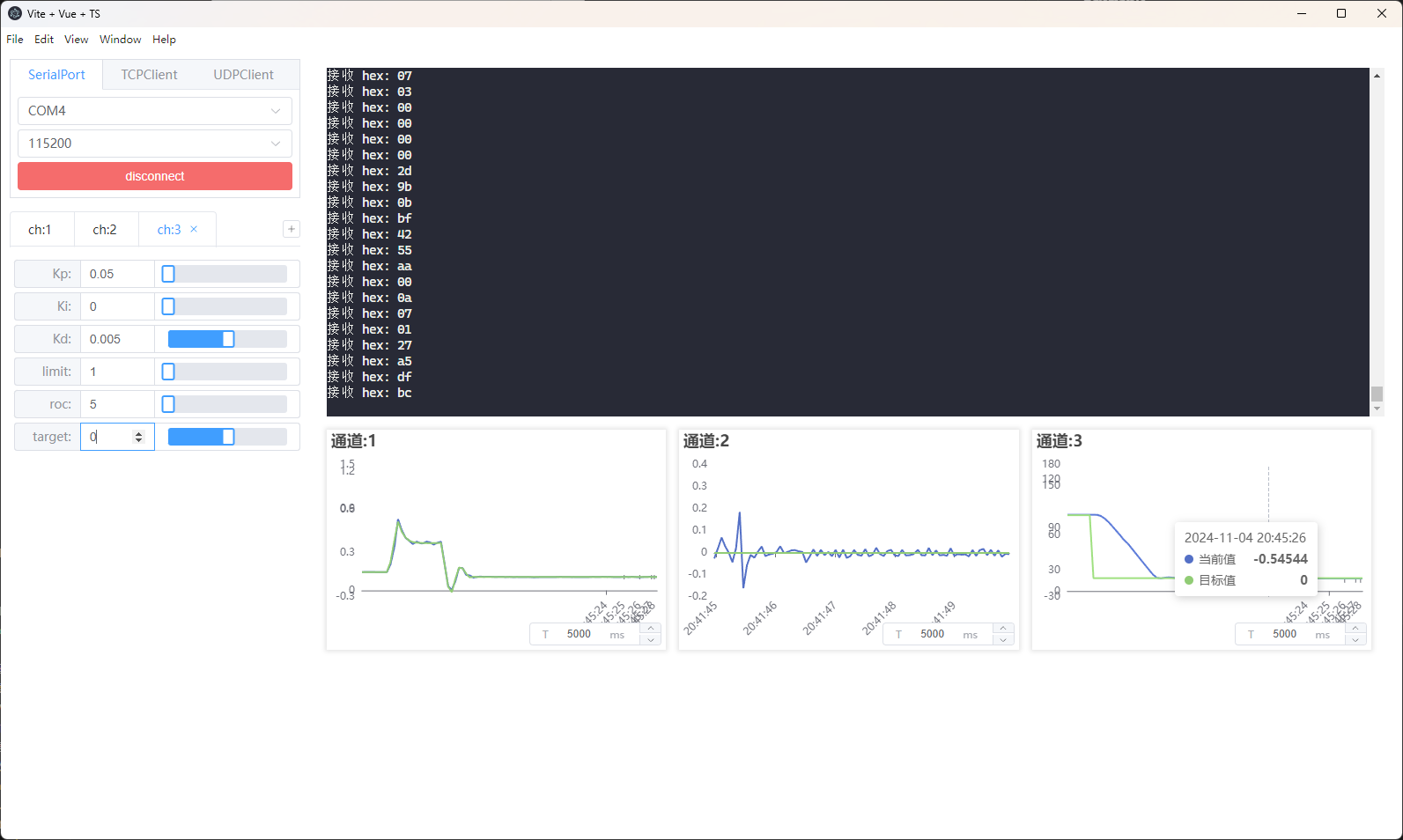
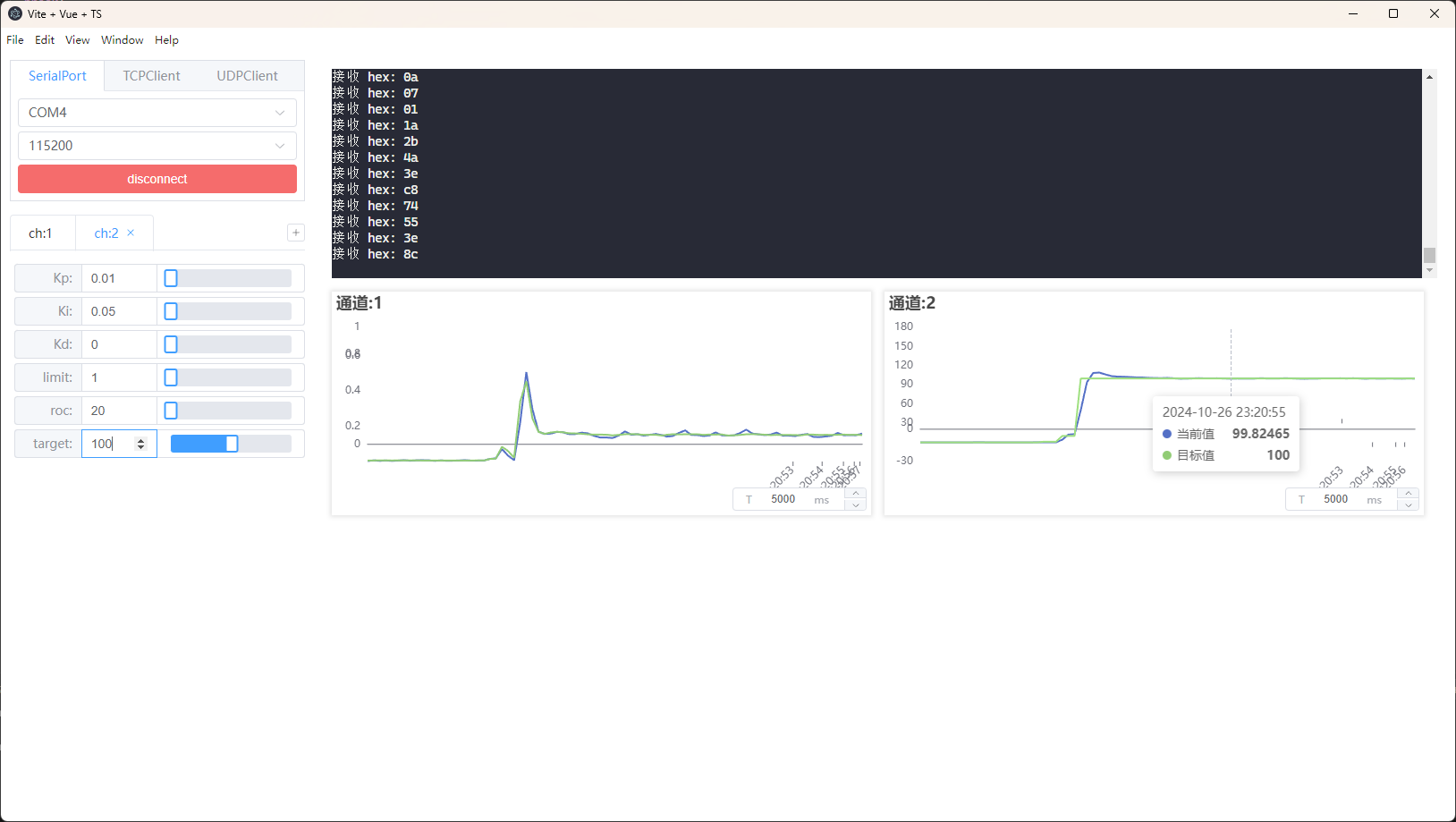
#endif实现效果
电流闭环控制效果
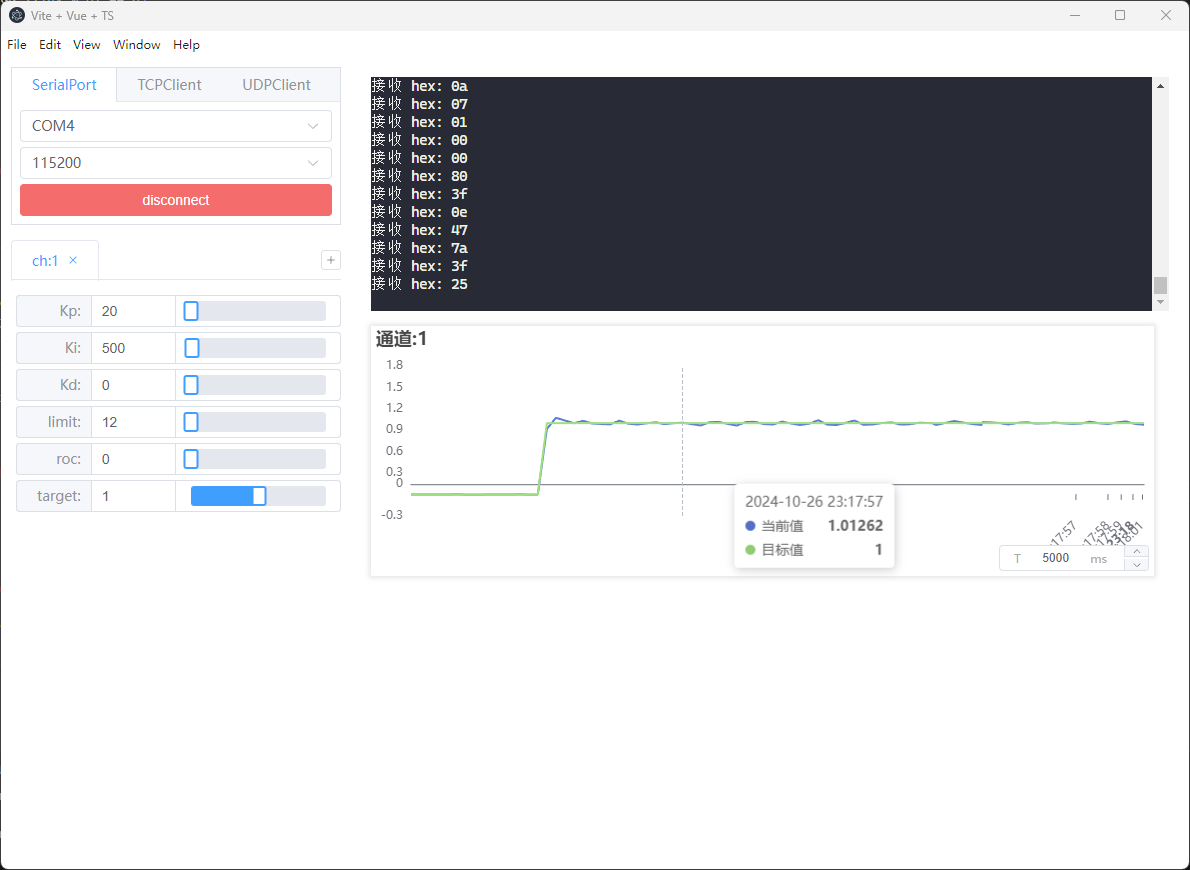
速度闭环控制效果
代码
#include <Arduino.h>
#include <Wire.h>
#include "BLDCMotor.hpp"
#include "BLDCDriver.hpp"
#include "Sensor.hpp"
#include "foc_utils.h"
#include "typedef.h"
#include "pwm.h"
#include "Command.hpp"
BLDCMotor motor = BLDCMotor(7, 12);
#define M1_En 8
#define M1_Ua 5
#define M1_Ub 9
#define M1_Uc 6
PwmOut pwmA(D5);
PwmOut pwmB(D9);
PwmOut pwmC(D6);
BLDCDriver driver = BLDCDriver(
// init driver
[]()
{
pinMode(M1_En, OUTPUT); // enable
// pinMode(M1_Ua, OUTPUT); // a
// pinMode(M1_Ub, OUTPUT); // b
// pinMode(M1_Uc, OUTPUT); // c
// 20k
// period 50us = 20,000hz; pulse 0 us = 0%
// pwmA.begin(20000.0f, 0.0f);
// pwmB.begin(20000.0f, 0.0f);
// pwmC.begin(20000.0f, 0.0f);
// 10k
pwmA.begin(10000.0f, 0.0f);
pwmB.begin(10000.0f, 0.0f);
pwmC.begin(10000.0f, 0.0f);
},
// enable or disable driver
[](bool enable)
{
digitalWrite(M1_En, enable ? HIGH : LOW); // enable
},
// set pwm to driver
[](int16_t u_a, int16_t u_b, int16_t u_c)
{
// 设置占空比
// [-32768,32768] => [-1,1] => [-50,50] => [0,100]
pwmA.pulse_perc(u_a / 32768.0f * 50 + 50); // 设置百分比
pwmB.pulse_perc(u_b / 32768.0f * 50 + 50);
pwmC.pulse_perc(u_c / 32768.0f * 50 + 50);
});
#define AS5600_ADDR 0x36
#define AS5600_RAW_ANGLE 0x0c
#define AS5600_ANGLE 0x0e
Sensor sensor = Sensor(
[]()
{
// AS5600 最高支持1Mhz 1000000
Wire.setClock(1000000); // 100000 (standard mode) 400000 (fast mode) 1000000 (fast mode plus)
Wire.begin();
},
[]()
{
Wire.beginTransmission(AS5600_ADDR);
Wire.write(AS5600_ANGLE);
uint8_t err = Wire.endTransmission(false);
if (!!err)
{
// Wire.endTransmission(true);
// Serial.print("errorcode:");
// Serial.println(err);
return (uint16_t)0;
}
Wire.requestFrom(AS5600_ADDR, 2);
uint16_t data = 0;
*((uint8_t *)&data + 1) = Wire.read();
*((uint8_t *)&data + 0) = Wire.read();
err = Wire.endTransmission(true);
if (!!err)
{
// Serial.print("errorcode:");
// Serial.println(err);
return (uint16_t)0;
}
delay(1); // 这行代码解决了磁编码器有时无法读取的问题,开始怀疑时排针接触不良,然后尝试焊接排针问题依然存在,然后怀疑是SDA\SCL上拉电阻太多导致,拆掉问题依旧存在,然后怀疑是电机导致的电压波动,然后给AS5600供电加了个1uf和0.1uf电容,问题依旧,最后google搜索后发现别人的代码中有delay遂加上,问题解决.
// as5600 12bit精度,左移4位变成16位
data <<= 4;
// Serial.println(data);
return data;
});
#include "CurrentSensor.hpp"
#define M1_Ia A0
#define M1_Ib A2
#define M1_Ic
#define I_R 0.01f // 10mΩ
CurrentSensor currentSensor = CurrentSensor(
[]()
{
pinMode(M1_Ia, INPUT);
pinMode(M1_Ib, INPUT);
// Arduino 板上的标准分辨率为 10 位 (0-1023)
analogReadResolution(14); // UNO R4 支持高达 14 位(0-16383)的分辨率
analogReference(AR_DEFAULT); // 默认参考电压 5 V
// analogReference(AR_INTERNAL); // 内置参考电压 1.5 V
},
[]()
{
// [0,16383] => [0,5]
return CurrentABC{
// i = u/r
.a = (analogRead(M1_Ia) / 16383.0f * 5.0f - 2.5f) / 0.01f / 50,
.b = -(analogRead(M1_Ib) / 16383.0f * 5.0f - 2.5f) / 0.01f / 50, // b电路接反了 加符号
};
});
Command command;
void setup()
{
Serial.begin(115200);
motor.connectDriver(&driver);
motor.connectSensor(&sensor);
motor.connectCurrentSensor(¤tSensor);
command.connectMotor(&motor);
command.connectSerial(&Serial);
motor.connectCommand(&command);
motor.initFOC();
motor.setMode(BLDCMotor::ControlMode::Current);
}
void loop()
{
motor.loopFOC();
command.update();
// Serial.println(sensor.getPositon());
}